�l(f��)���r�g�����ٷ��늹��QՓ���g�[��1��
ժ Ҫ�� ժ Ҫ���OӋ��һ�N�Ɍ��҃�늚��O���M���Ԅ�Ѳҕ�ęC���ˡ�ͨ�^��׃����҃ȬF(xi��n)����r�Č��H��r�{�飬�����늚�����P�x���M������ȡ�Ӻ͌����w���|�z�y�ķ��������C���˷ֳ��Ƅ�ƽ�_(AGVС܇)������ϵ�y(t��ng)(���I(y��)ƽ�塢PLC�����P��������)�����w�Cе�Y��(С�[�۽Y������
����ժ Ҫ���OӋ��һ�N�Ɍ��҃�늚��O���M���Ԅ�Ѳҕ�ęC���ˡ�ͨ�^��׃����҃ȬF(xi��n)����r�Č��H��r�{�飬�����늚�����P�x���M������ȡ�Ӻ͌����w���|�z�y�ķ��������C���˷ֳ��Ƅ�ƽ�_(AGVС܇)������ϵ�y(t��ng)(���I(y��)ƽ�塢PLC�����P��������)�����w�Cе�Y��(С�[�۽Y������[�۽Y������������)��ͨ�^�����Ƅ�ƽ�_�Ƅӵ��̶��ęz�y�c�����w�Cе�Y���M�����������D�����I(y��)�����C���գ����P�������z�y����ԇ����r����Ѳ�z�C�������������Ҫ���F(xi��n)��Ѳ�z�Ԅӻ���
�����P�I�~��Ѳ�z�C����;���|ʽ�z�y;�[�۽Y��;�����Y��
����0 �� ��
������������Ї��F·Ѹ�ٰl(f��)չ�����H���F·܉���c��܇������������F·���׃������Ĕ���Ҳ�ڲ������ӣ�����¹ʰ�ȫ�[��Ҳ������څ�ݣ��@ֱ��Ӱ푵����F·�\�I���������F·���w��ȫ���棬���҇��v��Ľy(t��ng)Ӌ�����������oՓ�ǰl(f��)���Δ���߀��ֱ�ӽ����pʧ������¹ʶ��Dz��ݺ�ҕ�IJ���[1-2]��Ŀǰ���@Щ�������Ѳҕ��Ҫ߀�Dz�ȡ���y(t��ng)�˹�Ѳ�z�ķ�ʽ���������ن��}��1)�ˆT���}����ǰ늹��ˆT��o���㣬�S�o�ˆTˮƽ���ޣ�����ֵ���ˆT�L��̎�ڼӰࡢƣ�ڵĠ�B(t��i)���o���нo������İ�ȫ�����[����2)�������}�������˹�Ѳ�z��ʽ����늷��\�Д���ӛ䛶������һ��ֻ������������������\��ֵ���ˆTͨ�^ӛ����P�\�Д���ӛ䛁팍�F(xi��n)��ͨ��Ҳ���M��Ӌ��Cϵ�y(t��ng)���o��������÷��ա�3)�����A���}�������˹��ɼ��Ĕ������^�٣������N�ȫ�棬���w�治���xɢ���^���Ҷ��鼈�ϔ���������Ҳ�͟o���A�Ȱl(f��)�F(xi��n)��늷����O��ĝ��ڹ��ϣ�Ҳ�o����һ�r�g�ڹ��ϰl(f��)���r�ψ��ȱ�c����K������늿ɿ��Դ�����͡�4)�\�бO(ji��n)�؆��}���mȻ�F(xi��n)�е�����\���������ıO(ji��n)��ϵ�y(t��ng)������늷��h(hu��n)��߀�]�Ќ��F(xi��n)�Ԅӌ��r�O(ji��n)�y�\�Р�r��Ҳ���^�y���F(xi��n)����¹ʵ��A���Ϳ��ơ�
�������ڙC����Ѳ�z������ǰ�ɷN���нӽ�Ѳ�z����ȫ�Ըߺͳɱ����������ă�(y��u)�ݣ����Ѳ�z�C���˳ɞ��ˇ������о����c[3] ��
����1 Ѳ�z�C���˵�ϵ�y(t��ng)�M��
����ԓѲ�z�C������Ҫ�������ֽM�ɣ��Ƅ�ƽ�_(AGVС܇)��늚���ƹ����w�Cе�Y��(��D1)���Ƅ�ƽ�_����׃�վѲ�z�C���˵���Ҫ�M�ɲ�λ���������ߙC�����c�����Է֞�܉��ʽ��݆ʽ���Ď�ʽ3�N��Ҫ��� ����һ�����^���x��AGVС܇�@�N݆ʽ�Y�������Ƅ�ƽ�_������Ҫؓ؟�\�d�C�������w���҃������ŗl܉���\�ӣ�������O�Ķ�̎վ�c(�ؘ˿�)̎ͣ�£�ʹ�ÙCе�Y�����M���\�Ӻ͌��҃ȹ��w�ęz�y;늚���ƹ�����Ҫ�b��PLC ���ƾ�·���I(y��)ƽ����X�����ڿ���AGVС܇���Cе�Y�����\�Ӻ͌��z�y��Ϣ�Ľ��շ���̎���@ʾ;���w�Cе�Y���t�֞�3�K���քe��С�[�ۡ���[�ۺ��������ܣ�����С�[�ۺ������������b�й��I(y��)�z���^���Á��xȡ�҃�늚���ϸ��N��Ϣ�Ԃ��f�o���I(y��)Ӌ��C̎������[���τt�b��늉��������ͼt��ضȂ�������
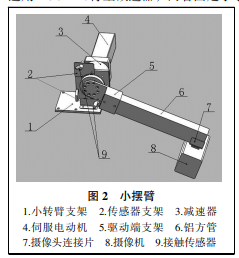
����2 Ѳ�z�C������Ҫ�Cе�Y�����OӋ
����2.1 ��С�[�۵��OӋ
��������Ѳ�z�������и߶��^��(0.3 m)���Ŀ������ AGVС܇�ĸ߶ȣ������ڙC������Ϣ(��ԭ�c���)�r��Ҫ��ȫ���Cе�Y���ջص�AGVС܇�Ϸ����@����Ҫ�[���ڹ����r�[��AGVС܇��ƽ������,��D2��ʾ��
������M��ץ����ץ�o�܉������D��Ҫ���x�ò��� SMC60S��̖�IJ��M늄әC���c���M늄әC��ϵĜp�����x��PL90P-40���ǜp���������߹̶���С�D��֧�ܣ�ݔ�� �� �B �� ���ܣ����B���ϔz���^��С�D��֧���Ϲ̶��Ѓɂ�����֧�ܣ���֧���ϸ���һ���|�����������ڙz�y�D��λ�ã�������֧���������ף������{��(ji��)������λ�ã��Mһ��ʹ���{��(ji��)С�D�ۘO��λ�ø��鷽�㡣
�����cС�[���ϰ��b�����C��ͬ����[��ĩ�˰��b���ǎ���һ�����ԵĂ������M��(��������)����[�۵��OӋ��D3��ʾ�������Y���cС�[����ƣ������ŷ�늄әC���p�������Ӕ[�۵��D�ӣ���ͬ����������һ��ͬ����ϵ�y(t��ng)����݆��֧��1�̶����D��֧���ϣ�����݆��֧���а��b��ͬ����݆3��ͬ����2һ���B����ͬ����݆3����һ���B�ӹ̶��ڎ�݆С֧�� 5 �� �� ͬ �� ��݆��ԓͬ����݆���b���S�У���ͨ�^�N�S�̶���֧�ܰ�4�ϡ�����ͬ����݆3���̶��ڎ�݆��֧��3�ϣ��ǟo���D�ӵģ����[���D��һ���Ƕȕr��ͬ����2���S֮�\�ӣ�ͬ������������ͬ����݆2 �D��һ����ͬ�ĽǶȣ����õ���ͬ����������݆С֧��5�D�ӵĽǶȡ����ǣ���݆С֧��������ͬ�����D�ӵĽǶ��cͬ����(�X����)�������D��֧��(����)�D�ӵĽǶ������������݆С֧���������D��֧��(����)�o�D�ӡ���ˣ�ֻҪ���b�r���֎�݆С֧���ϱ���ˮƽ����ô�oՓ�[������D�ӣ�֧���ϱ���ʼ�K����ˮƽ���@�����Ϸ����b�Ă��������ṩ��ƽ�_��
����2.2 �������е��OӋ
�������������������N������——��늂��������t��ضȂ��������ӂ����������з�늂��������t��ضȂ������Ǟ��˱O(ji��n)�y늚��ȷ���Լ�����ضȠ�r�����ӂ������Ǟ��ˌ��F(xi��n)�[���D�ӵ�ֹ���O�õġ�
�����������еĽY����D4��ʾ���װ��ϰ��b��ֱ���S�������ɸ�������һ���A���s�����ɵĹ��Sһ�˹̶��ڂ��������ϣ���һ�˴��^ֱ���S�У������������b���~���S�к��ӂ����� ֧ �� ���ٷքe�̶��Ϸ�늂��������ӂ��������װ�̶��ڴ�[���ϡ�
����Ѳ�z�C�� �� �� ���r�����_�ؘ˿��O��λ�ã���[����늚���� �D �ӣ����������N��� �� ��ֱ���ӂ���������늚�����ô�[�����D��һ���̶��Ƕȣ�ʹ��늂��������N����늚���ϙz�y늉������ڂ��������Ϗ��ɺ��~���S�е��O�ã��oՓ��AGV܇��ƫб����[���D�ӽǶ���ƫ�߀��늚����w�Aб����늂����������D�^һ���ĽǶȣ��o���N����늚�����M�й�����
����2.3 �������C�ܵ��OӋ
�������������ϰ��b�z��C�����ڙz�y늚����ָʾ���Ġ�B(t��i)��ӛ䛱��^�Ĕ������z�y���T���_�Ϡ�r��
�����������ܽY����D5��ʾ������ģ�M�̶��ڵ����ϣ����� SM60S�ŷ�늄әC�ӡ�ģ�M���_�Ϲ̶��з��ܣ��������b�о��Ԍ�܉����܉���K�c�z��C֧���B�ӡ����ܵ����¶˸��b��һ�S���S���b���S�к�ͬ����݆���S�зքe���S��Ȃȵ���Ͳ��λ��ͬ�������ڃ�ͬ����݆���D�ӣ�ͬ����һ��ͨ�^������B��Ƭ�̶��ھ���ģ�ϣ���һ��Ҳͨ�^������B��Ƭ�̶��ڔz��C֧���ϡ�
������ģ�M���_�����r�����������ڹ̶���ģ�M�ϵ�ͬ���������Ƅӣ���ͬ�����_ʼ�D�ӣ���������ģ�M�����ĸ߶ȵ��ڔz��C�����ڷ��������ĸ߶ȣ��γ���һ�����������ĽY����ʹ�z���^�܉����������ߵ�λ��(2.5 m)������z��C�·��B���в��M늄әC�����D�ӣ��@ʹ�����������ϵĔz��C���Զ�Ƕ�ȫ��λ���M���Ĕz������
����3 �Y Փ
����늚���Ԅ�Ѳ�z�C���ˌ��F(xi��n)���҃�늚��O���Ѳ�z�Ԅӻ����p�p�˹����ˆT�Ąڄӏ��ȣ���������I(y��)�Ąڄ����ɱ����������˹���Ч�ʡ���[�۽Y�����õ�ͬ����ϵ�y(t��ng)���������в��õď��ɼ��~���S�нM�ϳɵ�һ�N���|ʽ�z�y�Y�������O��z�y�ṩ���µ�˼·������Ѳ�z�C������Ȼ�кܴ�İl(f��)չ���g�����猍�F(xi��n)Ѳ�z�C���˸��������IJ���������Ѳ�z�C���˸�׃�˂��y(t��ng)���҃�늚��O��Ѳ�z��ʽ��������O��Ѳ�z�I��İl(f��)չ���x���h�� ——Փ�����ߣ�����\�� �����M�� κ���� ������
����[�� �� �� �I]
����[1] �_����,���ޱ.׃�վ�Ԅ�Ѳ�z�C����ϵ�y(t��ng)�����P�I���g[J]. 늚⑪��,2014,33(13):80-84.
����[2] �����x,������,�O��,��.����׃�վѲ�z�C�������Ƽ�����[J]. ���ϵ�y(t��ng)�Ԅӻ�,2011,35(19):85-88,96.
����[3] �ξ�,�ǹ�ƽ,����,��.�߉�ݔ늾�·����Ѳ�z�C���˵������c����[J].��h��W�W��(���W��),2016,49(3):446-451,464.
����[4] ����|,�S����,���^��,��.׃�վѲ�z�C�����о��F(xi��n)��C��[J]. ɽ�|������g,2015,42(1):30-34.