�l(f��)���r�g�����ٷ�����̎��QՓ���g�[��1��
ժ Ҫ�� ժҪ����ģ�M�{�T�ĸ��Y�{��О飬�����]�{�T���_���Ժ�ӛ��Ч�������ڌ�܇���Y��(sh��)��(j��)�������Ӗ����һ�N�����L����ӛ��(LSTM)��(j��ng)�W(w��ng)�j������܇�v���Yģ�͡�����ԓģ���о��{�T��ӛ��Ч��Ӱ푕r�L���M�н�ͨ���档�Y(ji��)���������cͬ�w�e�[�،���(j��ng)Ԫ��
����ժҪ����ģ�M�{�T�ĸ��Y�{��О飬�����]�{�T���_���Ժ�ӛ��Ч�������ڌ�܇���Y��(sh��)��(j��)�������Ӗ����һ�N�����L����ӛ��(LSTM)��(j��ng)�W(w��ng)�j������܇�v���Yģ�͡�����ԓģ���о��{�T��ӛ��Ч��Ӱ푕r�L���M�н�ͨ���档�Y(ji��)���������cͬ�w�e�[�،���(j��ng)Ԫ��ǰ����(j��ng)�W(w��ng)�j���^��LSTM��(j��ng)�W(w��ng)�j�ĸ��Yģ���A�y�Y(ji��)�������N���^�yֵ�Ҹ���ƽ�����ӽ��{�T�Č��H�{��О�;�{�T�О��ܮ�ǰ�h(hu��n)������ǰ1.0~3.5s��(n��i)��ӛ��Ӱ�;ԓģ���܉���ɢ��ͨ���еĔ_�ӣ�ģ�;����^�õĿ��ɔ_�����ͷ�(w��n)���ԡ�
�����P(gu��n)�I�~����ͨ��Ϣ���̼�����;���Yģ��;�L����ӛ����(j��ng)�W(w��ng)�j;ӛ��Ч��;��ͨ����
����0����
�����S���҇���܇��������ߣ����Y�ɞ���е�·���r������Ҫ�Ĺ��r֮һ����(j��)���Yģ�͵���ʽ�����Ԍ����Yģ�͵��о��֞�ɷN��ͣ���(sh��)�W����ģ�ͺ��˹�����ģ��[1]��ǰ���ǔ�(sh��)�Wʽ��ʽ��ʾ���Y���r���ٶȡ�܇�^�r�ࡢ���ٶȵ�֮�g���P(gu��n)ϵ����GHRģ��[2��3]���S���о����룬���Yģ���������{�Tƫ�á�ע���������е����أ�ģ�͏��s����ߣ��翼�]�����Ը�Ӝp�ٵ�Gippsģ��[4]����������܇�^�r���Hellyģ��[5]�����]�{�T��֪�ֵ������-����ģ��[6]�������{�Tģ��[7]���Լ�����ģ��߉�ĸ��Yģ��[8]�ȡ����ϔ�(sh��)�W����ģ��ͨ�^���������{�T���Ը��õ�ģ�M���Y���r�������Y�О��Ƕ�N���Թ�ͬ���õĽY(ji��)�������]��N���ԵĔ�(sh��)�W����ģ�ͷdz����s����˷��@һ���}���о��ߌ�ע�����D(zhu��n)�����˹�����ģ�͡��˹���(j��ng)�W(w��ng)�j�������˹�����ģ���Б����^��ķ��������ܻ���Ӗ����(sh��)��(j��)�l(f��)�]�䷺��������ӳ��N�{�T�A��������ݔ��ģ�ͣ��ڸ��Yģ�ͷ����л���ǰ����(j��ng)�W(w��ng)�j��һ���B(t��i)[9]�͑�����ɢ��B(t��i)[10]�ĸ��Yģ�ͣ��Լ�����������ĸ�����(j��ng)�W(w��ng)�j���Yģ��[11]�ȡ�
���������{�Tƫ�õ����أ��{�T��ӛ��Ҳ�����{��О�a(ch��n)��Ӱ푣����]ӛ�����{��О���ӽ��挍��r[12]������ԓ˼�룬Xin��[13]ͨ�^�����ٶ�ӛ�����M���y(t��ng)�Ǿ���ģ�ͣ����]܇�^�r��ӛ���ĸ��Yģ��[14��15]Ҳ�������Pei��[12]��ӛ��Ч����٤�R�ֲ�����ʽ���뾀�Ը��Yģ�Ͳ��������䷀(w��n)���ԡ����ˌ�ӛ��Ч�������܇ģ�ͣ�ͬ�r�����˹�����ģ���ڿ��]�{�T��N���Եă�(y��u)�ݣ�Huang��[16]�������L����ӛ��(Longshort�\termmemory��LSTM)��(j��ng)�W(w��ng)�jӖ�����Yģ�ͣ���ԓ�W(w��ng)�j���ڶ����[�،ӵ������(j��ng)�W(w��ng)�j���W(w��ng)�j�Y(ji��)��(g��u)���s��Ŀ�˅���(sh��)�^�࣬��(sh��)��(j��)������߉��������
�����鿼�]�{�ƫ�á��{�Tӛ���ȶ�N���،����Y��Ӱ푣����Ę�(g��u)����LSTM�\ȫ�B�ӌӵ���(j��ng)�W(w��ng)�j�Y(ji��)��(g��u)�����ڵ�·��܇�����Y��(sh��)��(j��)��Ӗ�����Y(ji��)��(g��u)��������ӛ�����ܵĸ��Yģ�ͣ��cǰ����(j��ng)�W(w��ng)�j���^�A�y�Y(ji��)��������ģ���о��{�T��ӛ��Ч��Ӱ푕r�L����������ԓģ�͵Ŀ��ɔ_�����ͷ�(w��n)���ԡ�
����1��(sh��)��(j��)�ɼ��c̎��
����1.1��(sh��)��(j��)�ɼ�
�����挍��·��܇���@ȡ�ĸ��Y�{(sh��)��(j��)���о��{�T���Y�О�Ļ��A(ch��)�������x����һ�l�p����܇�����ٹ�·��ԓ���ٹ�·���ڔU����������7km·�����깤����δ�_ͨ������пɱ���������ͨӰ푣���·�ξ������ã��Դ����錍�����M�и��Y�{
���������ǰ������v܇���b���O(sh��)��ɼ���·�h(hu��n)����Ϣ��܇�v��B(t��i)���{�T������Ϣ�����Дz��C�ɼ�ҕ�l�Ի������Ƿ��Ю�����r���T�Ԍ���ϵ�y(t��ng)�ɼ���܇�ٶȺͼ��ٶȣ����ײ����_�ɼ����Y�g�࣬����(sh��)��(j��)���Ͻy(t��ng)һ���l��10Hz�����ɼ�20���{�T���{(sh��)��(j��)������16�����ԣ�4��Ů�ԣ������쾚�{���g��25~50�q���ȡ������ǰ܇�{�T���Ղ������T��(w��n)���{��܇�{�T�����m���x���Y�����r���������Ƿ���ǰ܇�ٶ��^���Џ��ҵij�܇�_�ӻ���ǰ܇�ٶ��^���и�܇���y���^����ǰ܇�ٶȾ��в����ԣ���܇���О����ǰ܇��ǰ�О�׃���ķ�����Ҳ�������{�Tƫ�ú�ӛ�������ص�Ӱ푡�
����1.2��(sh��)��(j��)̎��
�������Ğ����о���(w��n)���ĸ��Y�{��О飬�ų��������ص�Ӱ푣�����(w��n)�����Y�M���˶��x��������(j��)���x�Y�x��(sh��)��(j��)����ʹ��ȡ�Ĕ�(sh��)��(j��)�δ_�����ڸ��Y�О飬HCM2000���x�p܇����·܇�^�r�����5s�r܇�v����������B(t��i)��ǰ܇��B(t��i)��������܇�a(ch��n)��Ӱ푣����܇�^�r��С��5s���鱣�C���Y��(w��n)�����о�����[17]��(w��n)�����Y�^���Ѓ�܇�������ٶȾS����±2m/s�ķ�����(n��i)������ںY�x��(sh��)��(j��)�r��܇�ٲ�l���M���������ơ�������܇ͻȻ�Ƅӻ������Ƀ�܇�����\�Ӡ�B(t��i)��ͻȻ׃������ײ�r�g����(sh��)TTCi�ķ���ȡ±0.05s-1[9];��ʹ���Y�^����Ȼ�����g�{�T���������Џ��ҳ�܇�_�Ӻ�܇���y����r��
����2����LSTM��(j��ng)�W(w��ng)�j�ĸ��Yģ��
����2.1LSTM�K�Y(ji��)��(g��u)
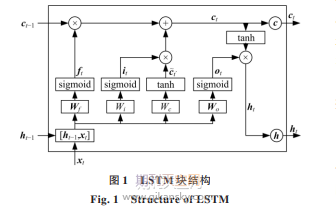
������ǰ����������LSTM��(j��ng)�W(w��ng)�j��ģ�;���ӛ�����ܣ�ԓ�������ɾW(w��ng)�j�е�LSTM�K�ṩ�ģ��D1��LSTM�K�ĽY(ji��)��(g��u)�D����t-1�r�̂��f�^���Ć�Ԫ��B(t��i)ct-1��ݔ��ht-1��t�r�̵�ݔ��xt��ͬ��(g��u)��LSTM�K��ݔ�딵(sh��)��(j��)��ݔ����(sh��)��(j��)��t�r�̵Ć�Ԫ��B(t��i)ct��ݔ��ht��LSTM����3���T���քe���z���Tft��ݔ���Tit��ݔ���Tot�������z���T�Q��t-1�r�Ġ�B(t��i)��Ԫct-1Ӱ�ct�ij̶ȣ�ݔ���T�Q��t�r�̵�ݔ��xt���������M��ct����ݔ���T�Q��t�r�̵Ġ�B(t��i)��Ԫct���������M��ݔ��ht��ct��ht�م��c��t+1�r��LSTMӋ�㡣
����2.2LSTM��(j��ng)�W(w��ng)�j�Y(ji��)��(g��u)
�����{�T����(j��)ǰ܇�О��{(di��o)����܇�ˑB(t��i)���ԾS��������ȫ��(w��n)���ĸ��Y�^�̡�����(j��)���J�Ļ����ٶ�[18]���{�T�ڸ��Y��ԇ�D�{(di��o)��(ji��)��܇�ٶȣ��cǰ܇�ٶȱ���һ�£�GHRģ��[3]�t�J���{�T߀�����]��܇�g���{(di��o)��(ji��)܇�٣��{�T�ڸ��Y�^�������B�m(x��)��(w��n)�����ٶ�׃����������ٶ�ͻ׃����˱����Yģ�Ϳ��]��ǰ܇܇��vl����܇܇��vf����܇���ٶ�af��܇�ٲ�Δv��܇�g��d��܇�^�r�ࡢTTCi��ǰ܇���ٶȵ�Ҳ�����������Yģ���н�(j��ng)�����]�ą���(sh��)��������C���@Щ����(sh��)�o����߱�ģ�͵�Ч������˲��迼�]��
�������P(gu��n)֪�R���]����Щ��ͨ�ڿ������
�����cǰ����(j��ng)�W(w��ng)�j��ƣ�LSTM��(j��ng)�W(w��ng)�jҲҪ�_���[�،���(j��ng)Ԫ����(sh��)�������F(xi��n)��LSTM��(qu��n)�ؾ�ꇵľS�ȣ���(j��ng)Ԫ����(sh��)�Q����Ӗ���W(w��ng)�j��Ҫ�_���ą���(sh��)��(sh��)����Ҳ�c�W(w��ng)�j��(li��n)���������P(gu��n)���O(sh��)�ò�ͬLSTM��(j��ng)Ԫ����(sh��)��Ӗ�����yԇ�ӱ����ӱ���r���1��ʾ��Ӌ���A�y�c�^�y�ĺ�܇�ٶ�vf��܇���xd������(MSE)���õ��Y(ji��)��Ҋ��2��
�����ɱ�2��֪����(j��ng)Ԫ�^����^�ٕr�yԇ�Y(ji��)��������(w��n)�����@�����ڱM����(j��ng)Ԫ�^�ٵľW(w��ng)�j��Ӗ���r�����ҵ����_���Ք���������ͬ�Ęӱ����o�����C�����(li��n)������;��(j��ng)Ԫ�^��ľW(w��ng)�j��ҪӖ������ą���(sh��)�����Ք��^���и���������ֲ���Сֵ���Ք�����@��һ���г��(li��n)�������ķ�(w��n)��ģ�ͣ�����(j��)��2�Y(ji��)����LSTM��(j��ng)�W(w��ng)�j����(j��ng)Ԫ����(sh��)�O(sh��)��10��
����3���Yģ�ͽY(ji��)��ӑՓ
����3.1���Yģ��Ӗ���Y(ji��)��
�����x��һ�η�(w��n)�����Y��(sh��)��(j��)��������Ӗ���ӱ����ӱ��L�Ȟ�200������(j��)��2��(ji��)�O(sh��)�õą���(sh��)Ӗ��LSTM��(j��ng)�W(w��ng)�j���xȡһ���ٶȷ�������Ĕ�(sh��)��(j��)������yԇ�ӱ��������cǰ����(j��ng)�W(w��ng)�j�����܌��ȣ���(g��u)��һ������һ���[�،ӵ�ǰ����(j��ng)�W(w��ng)�j���[�،���(j��ng)Ԫ����(sh��)ȡ10��Ӗ�������ͅ���(sh��)�O(sh��)���cLSTM��(j��ng)�W(w��ng)�j��ͬ��
�����ӱ���r���3��ʾ���A�y�Y(ji��)��������D3��ʾ��LSTM��(j��ng)�W(w��ng)�j��ǰ����(j��ng)�W(w��ng)�j�A�y�Y(ji��)���c�^�yֵ�ľ���������4��ʾ��LSTM��(j��ng)�W(w��ng)�j����ͬ�ӱ����A�yЧ��������ͬ��������(sh��)��r�£�LSTM��(j��ng)�W(w��ng)�j��Ч��������ǰ����(j��ng)�W(w��ng)�j�������e�ӱ��美̖3��ǰ����(j��ng)�W(w��ng)�j���ٶ��A�y�Y(ji��)�����ӽӽ��^�yֵ���������x���A�y��Ȼ����LSTM��(j��ng)�W(w��ng)�jЧ���á����⣬�cǰ����(j��ng)�W(w��ng)�j��ȣ�LSTM��(j��ng)�W(w��ng)�j���A�y�Y(ji��)���ձ����ƽ�������ӽ��{�T���{��B(t��i)���@��ӛ��Ч���l(f��)�]���õĽY(ji��)����
����3.2ӛ��Ч��Ӱ푕r�L����
��������(j��)2.1��(ji��)��LSTM�K�Y(ji��)��(g��u)�cӋ�����̵��f����֪��LSTM��(j��ng)�W(w��ng)�j��ӛ��Ч����ͨ�^��Ԫ��B(t��i)ct��ݔ��ht�Ă��f���F(xi��n)�ġ����M���A�y�r����ʼ��c0��h0�����ꇂ��f�o�W(w��ng)�j���˕r���A�y��(sh��)��(j��)ӛ��oӛ���A�yֵ����t=0֮ǰ�Д�(sh��)��(j��)��c0��h0����һ�r�̂��f�^���ķ����ꇣ��˕r���A�y��(sh��)��(j��)ӛ����ӛ���A�yֵ��
�����ɈD4��֪���oӛ���A�yͨ�^�f�w����������c0��h0���A�y��Ӱ푣���ֵ��u������ӛ���A�yֵ����t=1.1s̎څ��һ�£���˿��J����ԓ�A���{�T�����ܮ�ǰ�h(hu��n)��Ӱ푣�߀��ǰ1.1s��(n��i)���{�ӛ��Ӱ푣���ӛ��Ч��Ӱ푕r�L��1.1s���������ӱ��y(t��ng)Ӌ�����c��ӛ��Ч��Ӱ푕r�L(Ҋ��5)��֪��ӛ��Ч��Ӱ푕r�L��1.0~3.5s��(n��i)�ֲ������{�T���{��^���еĮ�ǰ�О���ǰ1.0~3.5s��(n��i)��ӛ��Ӱ푡�
����3.3LSTM��(j��ng)�W(w��ng)�j���Yģ�͵Ľ�ͨ����
����������(j��ng)�W(w��ng)�j���Џ��s�ķǾ����P(gu��n)ϵ���y���M�������Ľ�ͨ����(w��n)���Է���[18]�����ǿ���ͨ�^��(sh��)ֵ�����z��俹�ɔ_�����ͷ�(w��n)���ԡ�
����4�Y(ji��)���Z
�������Ę�(g��u)����Ӗ���˻���LSTM-ȫ�B�ӌ���(j��ng)�W(w��ng)�j��܇�v���Yģ�ͣ�ԓģ�;���ӛ�����ܣ��cǰ����(j��ng)�W(w��ng)�j��ȣ�LSTM��(j��ng)�W(w��ng)�j�ĸ��Yģ���A�y�Y(ji��)�������N���^�yֵ�Ҹ��ӽ��{�T�Č��H�{��О顣�{�T��ӛ��Ч��Ӱ푕r�L�s��1.0~3.5s�����{�T��ǰ�О��ܮ�ǰ�h(hu��n)������ǰ1.0~3.5s��(n��i)��ӛ��Ӱ푡�����LSTM��(j��ng)�W(w��ng)�j�ĸ��Yģ���܉���ɢ��ͨ���еĔ_�ӣ�ģ�;����^�õĿ��ɔ_�����ͷ�(w��n)���ԡ��܌�܇��(sh��)��(j��)��Ӌ��CӲ�������ƣ�Ӗ����ģ�����ٶȷ������ޣ�δ�푪�ɼ������ٶȷ����ĸ��Y��(sh��)��(j��)Ӗ�������Mģ�͡�——Փ�����ߣ��Oٻ1������ӡ1��2