�l���r�g�����ٷ�����̎��QՓ���g�[��1��
ժ Ҫ�� ժҪ����·�|���z�y�����ܽ�ͨϵ�y����Ҫ�M�ɲ��֣������w�����³���Ӱ푵�·�|���ij�Ҋ����֮һ�������֙C����˲�ͬ�Ă����������S���о��б������ڵ�·�z�y�����������һ�N���������֙C�ĵ�·���w�z�y�c�������ʹ�������֙C�����ռ���·���w�D������ʹ����
����ժҪ����·�|���z�y�����ܽ�ͨϵ�y����Ҫ�M�ɲ��֣������w�����³���Ӱ푵�·�|���ij�Ҋ����֮һ�������֙C����˲�ͬ�Ă����������S���о��б������ڵ�·�z�y�����������һ�N���������֙C�ĵ�·���w�z�y�c�������ʹ�������֙C�����ռ���·���w�D������ʹ���֙C���ü��ٶ�Ӌӛ�܇�v܈�^���w�r�ļ��ٶȔ��������ھ��w�ĈD��z�y���҂�ʹ���� ResNet ��ȌW���W�j��Ӗ���z�yģ�ͣ��z�y������߿����_�� 80.79%����܇�v���^��ͬ�³��̶ȵľ��w���a����ͬ���ٶȔ�ֵ�Ļ��A�ϣ������һ�N���ڙC���W���ĵ�·���w�³��̶ȵķ������ԓ�������Ԍ��z�y���ĵ�·���w���³��̶��Ԅӵ��֞鲻ͬ�ĵȼ������á�һ���Լ��^���߷���ȿ��_ 86%���Y��������ԓ�����ڲ�ͬ�ĵ�·�l���¾�����Ч�z�y�����·���w��
�����P�I�~�������֙C;���w�z�y;��ȌW��;�C���W��;��·��ȫ
������·���|���z�y�������ܽ�ͨϵ�y�dz���Ҫ�������Ԅ��{�ϵ�y[1]���{��o��ϵ�y�ȡ������õĵ�·�|�����ڱ��C�{����m��[2]Ҳͬ�ӵ����P��Ҫ����Ό��r�����١��ʴ_�ؙz�y��·�|���ɞ��˼����Q�Ć��}��������Ȼ���g��ȱ�����r�ľS�o�����е�·��������p�ģ��a����������@Щ��·���������˵�·�|���Լ���܇���m�ԣ�Σ������܇��ȫ��
�������w�dz��е�·����Ҫ�Oʩ֮һ����õľ��w���ڵ�·��ȫ�dz���Ҫ�����w�Į����³��dz��е�·�ij�Ҋ�����������˵�·�������m�ԣ����ؕr������Ӱ�܇�v�����˵İ�ȫ��ͨ�^����·���w�³��ęz�y�����Կ�����Ч���R�eӰ푵�·��ȫ��܇�IJ������أ����·�B�o�ṩָ���ͽ��h��һ����r�£����w�����ęz�y��Ҫ�������I�O��͙z�y܇�v���缤�����_[3-8]������Ӱ��[9]�ȡ�Ȼ����ʹ���@Щ�z�y�����ɱ����F���z�y�����L���o��������Ч�ذl�F���w��������ˣ���ο��١���Ч�����r�ؙz�y���w�����ѳɞ�������Ҫ��Q�Ć��}��
������������֙C�����˸����������z���^�����ٶ�Ӌ��GNSS �ȡ���Ŀǰ���S���о��У������֙C���Á�z�y·��ֲڶȺ͵�·����[10-13]�����������֙C�ęz�y���g�����������ă��c����u�ɞ�һ�N���d��·�殐���z�y�o�����g���������·���w�z�y�H�Hͨ�^���w�����^���u�����r[9][14];Ȼ����߀�]��ʹ�������֙C������w�³��̶Ȳ��Д��·���w��r�����ӡ������֙Cһ������Բɼ����w�D�������ھ��w�z�y;��һ���棬��܇�v���^�³��ľ��w�r�����a�������ļ��ٶ���̖���@Щ��̖�����ڌ����w�³��̶��M�з��
�������ڴˣ�����������������֙C�ľ��w�z�y������ʹ��܇�d�����֙C�ɼ���·���w�D���Լ�܇�v܈�^���w�r�ļ��ٶȔ���;ͨ�^��ȌW���ķ���Ӗ��ģ����Ч���R�e��·���w;�����ÙC���W������㷨����·���w�³��̶��M�з�����Y�����������ķ����ڲ�ͬ�ĵ�·�l���¾�����Ч�z�y��·���w������w�³��̶ȡ�
����1 ��������
����1.1 ���������̸���
�����D 1 �Ƿ��������̈D����Ҫ�����ɂ����档���ȣ������֙C���b��܇�v�ϣ����ګ@ȡ�D�������D�����M���A̎���͘�ע��������ȌW���㷨Ӗ����·���w�z�yģ�ͣ��Ԅ��R�e�D���еĵ�·���w��
�����ڶ������D���еľ��w���R�e�����R�e�ľ��w���³��̶�������������֙C�ڲɼ��D����ͬ�r�ɼ�Ӌ���ٶȔ�����ͨ�^�C���W���㷨���ɼ����ļ��ٶȔ����M���A̎����Ӗ��������ģ�͌���·���w�³��̶��M���Ԅӷ������·���w���³��̶ȷ֞����á�һ����^�������ȼ���
����ͨ�^���σɲ��֣����Ԍ���·���w�Ġ�r�M�оC���u�r��
����1.2 ��·���w�D��z�y
����1.2.1 �D���ɼ��c̎��
�����ڱ�����У������֙C���b������D 2 ��ʾ�����������b����܇�ăx�����ϡ�
�����ڈD����ɺ��M�����x��ȥ���^��ģ����ʧ����Ӱ�ģ�͘����Ĕ�������ɔ������Ę�������֞���:�D�о��w�� �ĵ�·�D���ͨD�o���w���ĵ�·�D����Ȼ�����ЈD������ 7:3 �ı����S�C�֞�Ӗ�����͜yԇ����Ͷ�뵽ģ�͵Ľ����У�����Cģ�;��ȡ�
����1.2.2 �D���R�eģ���x��
�������e�W�j[15](Convolutional Neural Networks, CNN)��һ�N���о��eӋ�����ȽY����ǰ���W�j����������ȌW���Ĵ����㷨���L���ԁ�һֱ�LjD���R�e�I��ĺ����㷨֮һ���ڌW���������r���з��������ܡ��S����ֵӋ���O��ĸ����c�lչ���о��߂��_�l���S������ġ����s�ľ��e�W�j�㷨������ AlexNet��Inception v3 ��VGG��
����һ����f����߾W�j������εķ��������ӾW�j�Č��Ȼ���ȣ��W�j���Խ��W�j����Խ�á�Ȼ����AlexNet��Inception v3 ���W�j������һ���y�Խ�Q�Ć��}�����S���W�j��ȵ����ӣ��W�j�ݶ����הUɢ��ը��2015 ����ܛ���˹������F��_�l�� ResNet[16](�����W�j)�ܺõؽ�Q���@�����}��ResNet �W�j������ͨ������W�jģ�͵Ļ��A�ϣ����ض��I������������M����������ͨ��ģ�͵�ȫ�W�j���M���{���õ��m���ض��I�������W�jģ�͡� ResNet ���W�j�OӋ�� H(x) = F(x) + x���ܺõؽ�Q���ݶ����הUɢ��ը�Ć��}��
������D 3 ��ʾ��ResNet �W�j��Ŀ���D�Q��W��һ������� F(x) = H(x) - x��ֻҪ F(x) = 0���Ϳ��Ԙ�����ӳ�䣬ʹ�Ú���M�ϸ��Ӻ��Ρ�һ����f��ResNet �W�jʹ��ǰ�����������㷨�\�и�ƽ�����Y�������Σ����ӾW�j�Č��Ȼ���Ȳ��a��ؓ��Ӱ푡� ResNet �W�jʹ�Ú���K������Ҏģ���e�W�j����Ҏģ�� AlexNet �� 20 ����VGG-16 �� 8 �������ړ�������Ҏģ����ľW�j�Y����ResNet �����׃����������܉�ͨ�^�����ஔ����ȁ���ߜʴ_�ʡ��� 2015 ��ILSVRC �D�������w�R�e�㷨��ِ�У� ResNet ���ٱ�������ľ��e�W�j�㷨�ɞ����ă����ߣ�ȡ������ߵ��R�e���ȡ�
������ˣ�����ȌW��ģ�͵��x���ϣ����Č��x�� ResNet50 �W�j������ȌW���W�jӖ���D��z�yģ�͡�ResNet50 �W�j�� 5 �����e�K�M�ɣ���D 4 ��ʾ������ 49 �����e�Ӻ� 1 ��ȫ�B��(FC)�ӡ����У�һЩ�������O�����£��W�����O�Þ� 0.001��batch size �O�Þ� 256��
����1.3 ��·���w�³��̶ȷ��
����1.3.1 ��·���w�³��̶ȵȼ�
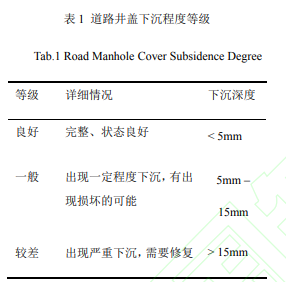
������������·���g��r�u���˜ʡ�JTG 5210-2018[17]���r���·�ij��ݻ�Ӳۑ���·��ľֲ��³����p�ȵēp����������� 10~25mm ���³����ضȓp��������ȴ���25mm ���³������ڵ�·���w���^�ڞr��·�����������l���p�����߮����³�����ܮa����Ӱ�Ҳ���鐺�ӣ���˱��ĽY�ϡ���·���g��r�u���˜ʡ��c���H������·���w�³��ȷ֞����á�һ����^��������D���á����w�³����һ��С�� 5mm���Dƽ�������w�³���ȼs�� 5mm ~ 15mm���D�^� ���w�³���ȼs�� 15mm ���ϡ��� 1 �o���˵�·���w�³��̶ȵķ��
�������·���w���³��̶ȵĻ������]���¡����ȣ������֙C�ļ���Ӌ������ӛ���܇�v܈�^��·�ϵľ��w�r��һЩ�ஔ�ߵ�˲�r���ٶȷ�ֵ���ڶ�����܇�vͨ�^��·���w�r��܇�v��ǰ��݆����܈�^��·���w����ˣ����ٶȈD�����ٕ����F�ɂ���ֵ��܇�v�������ӳ�ڼ��ٶȵIJ����ϣ����ٶȵIJ��ӷ����c܇�v�����^�ľ��w�³�������������P����·���w�³�Խ���ô܇�vͨ�^���w�rӛ䛵ļ��ٶȲ���Խ��܇�v���Խ��[18-19]��
�����D5��܇�vͨ�^��ͬ�³��̶ȵĵ�·���w�r�ļ��ٶ�׃�������Կ�����“����”���w�ļ��ٶȲ�����С��“һ��”���w�ļ��ٶȲ��Ӵ���“����”���w�ļ��ٶȲ��ӣ��� “�^��”���w�ļ��ٶ��������в���������� һ�� �^��D 5 ResNet50 �W�j�Y�� Fig.5 The acceleration of Different Manhole Covers ÿ��܇�v���^���w�r���������F�ɂ�˲�r��ֵ����ˣ������C��ͨ�^���ٶȵIJ��Ӂ�����w���³��̶��ǿ��еġ��ڔ����ɼ���ɺ��҂�����܇�v�뉺�^�ĵ�·���w���³�����M�Мy�����������³�����M��eӛ䛣�����m�������Ô����ʂ䡣
����1.3.2 ��·���w�³��ȼ����ģ���x��
�����ڔ����A̎����������ȡ֮ǰ���҂���Ҫ�x��һ�����m�ęC���W�����ģ�͌���·���w�³��̶��M�з���������c�о����ÙC���W�����������ٶȔ����M�з���M�������w�³��̶��M�з������ Manuel Ricardo Carlos ���ˌ��[20]���õ��ĽY�����҂���ʹ�ø��M���֧�������C(Support Vector Machine, SVM)ģ�͡��҂����ˌ���еĽ�ģ�����M�������ĸ��M�����Ӹ��౾������������(����С����ʾ)��ʹ֮�����m�ؑ����ڱ����еČ�
����1.3.3 �����A̎����������ȡ
����ͨ�^���b��܇�v��������֙C�ɼ�܇�v܈�^���w�r���ٶ�Ӌ������ӛ䛵����S���ٶȔ����������ռ���ɺ��҂���Ҫ�������M��̎����Ͷ��ģ�͵�Ӗ����
�������Ҫ��ÿ���ˌ��Լ��������֙C���_�ط�������ͬ��λ�ú̓A���Ƿdz������ģ������б�Ҫ�����A̎�����E������ؓ��Ӱ푡��҂��������r�g���� ACCx��ACCy��ACCz�ϳɞ�һ���Ϊ��ĕr�g����ACCm����ʾ���ٶȵĴ�С[12];ACCx��ACCy��ACCz �քe�� X��Y��Z �S�����ϵļ��ٶ�;ACCm ��ʾ�ϳɵļ��ٶȴ�С��
����2 ���Y���c����
����2.1 �����ɼ�
���������ʹ�õ�܇�v��һ�v�֠����I܇��ʹ�õ������֙C������ S8���A�� P30pro �Լ��A�� MATE20���ڌ���У����������IJɼ��l���O�Þ� 100Hz�������֙C�z���^��ÿ�� 1 �ε������M�ЈD���ɼ���
����2.1.1 �D����
������ͬ�ĵ�·���������߰���һ�Ľ����Լ���ͬ��ֲ�����w��r���@Щ�����Լ�ֲ���ڲ�ͬ��̫ꖹ��l�����a����һ�ӵ��Ӱ���@Щ�Ӱ��Ӱ������֙C�ɼ��ĈD�����|��������ʹ�������ӻ���ʹ�����ӽ����H��r���҂��ɼ��˲�ͬ��·�ϵĈD���������a�����_�ŵ�·�ͽ�������߅�����ɵ���
����ͬ�ӵģ���ͬ�����l�����D���IJɼ�������ͬ��Ӱ푡����磬����r������ꖹ��^����㣬·���ϵ��Ӱ���^�����@��ʹ�ĈD���е�·���w�y�Ա��R�e;���������r��܇�ȹ⾀��������Ӱ푈D����������;���⣬�����F��·��eˮ���a�����眆�ᡢ���⡢�͛]·��Ȇ��}����ˣ������S�������죬���C�D�����|�����҂��քe�����졢����Լ����IJ�ͬ���l���²ɼ��D����
�����҂��{�܇�v�����ڴ�W����У�^�M�Д����ɼ���·����Ҫ��r��·�档����п����ɼ��� 11,853 ����·�D������ 8291 �����о��w�ĵ�·�D��3562 ���ǟo���w����ͨ��·�D��Ԕ��Ҋ�� 3��
����2.1.2 ���ٶȔ�����
�����҂�ʹ�������֙C�ռ��� 1000 ��܇�v܈�^���w�r�ļ��ٶ�׃��������܇�v܈�^�ľ��w�N���“����”��“һ��”��“�^��” ����ɼ����ļ��ٶ�׃���������4��ʾ��
����2.2 �D���R�e�c�³��̶ȷ�Y��
����2.2.1 �D���R�e�Y��
�������ɼ����ľ��w�D�����c��ͨ��·�������� 7��3 �ı����֞�Ӗ�����c�yԇ�����҂����b�d Ubuntu ����ϵ�y�����C���M����ģ��Ӗ����ԓ���C���� Intel(R) Xeon(R) CPU E5-2690 v4 @ 2.60 GHz�� NVIDIA Corporation GP102 �� 12GB RAM �ȴ档
�����D���R�e������D 9 ��ʾ��ResNet50 ģ���܉��^�õ��R�e���D���еĵ�·���w�����ȼs�� 80.97%��
����2.2.2 ��·���w�³��̶ȷ�Y��
�����҂������ڴ�W����У�^�{���܇���ռ��� 1000 �����ٶȔ�������ʹ�ÙC���W���㷨�������ģ��֮ǰ���҂��������M���A̎��������Ӌ��ϳɼ��ٶȡ�������ȡ�Լ��˺���ע�����Д����S�C�֞�Ӗ�����͜yԇ���������� 8:2��֮���҂��������M���A̎������ȡ��Ҫ������ֵ����Ͷ�뵽���^���M���֧�������Cģ���С�
������ 5 ���·���w�³��ȷ�ĽY���������ϽY�����Կ�������Y���^�����ã����w���ȿ����_�� 86%��ʹ��֧�������C�����^�õķ����ͬ�³��̶ȵĵ�·���w��
����2.3 ����
����2.3.1 �D���R�e�Y������
�����ĈD���R�e�Y�����Կ�����ʹ����ȌW���ķ�������ResNet50�W�j�����z�yģ�ͣ��������õ��R�e���D���еľ��w����ͬ�r��߀����һ���ֱ��e�`�R�e���ߟo���R�e�ĈD����ͨ�^���@Щ�e�`������ԭʼ�D���M���˹���e���l�F�@Щ�D������һЩӰ�ģ���R�e�����ء�
�����D 10 �鲿���e�`�R�e���ߟo���R�e�ĈD�������п��Կ������R�eʧ������Ҫԭ���������c����һ�Ǯ�����r��܇�v�ē��L�����ϕ����F�����ĵ�Ӱ��Ӱ푈D�����|�����ڶ��������r���⾀�����㣬��·���w�c��·�ɫ��������ȶ��^�ͣ����w�ĈD�������^ģ�����������������L�r�g��ʹ���Լ�ȱ�پS�o��ijЩ��·���w���滨�y��u��ʧ(�M���P�E)�������o���R�e�����ģ���·���w���ܕ���Ϳ�ϵ�·���R���Ӵ�D���R�e���y�ȡ�
����2.3.2 ���w�³��̶ȷ�Y������
������� 5 ��ʾ��ʹ��֧�������C�����ͬ�³��̶ȵĵ�·���w����߾��ȿ����_�� 86%��“����”���w��“һ��”���w���ܺܺõı����_�����ͬ�r�����^�������ɂ��N�“�^��”��;��w�ķ�� Recall �� 70.0%��F-Measure �� 77.8%�����Ч��һ�㣬������ 30.0%���e�`���“һ��”����͡���Ҫԭ��������¡����ȣ����ռ��Ĕ������У�“�^��”�ľ��w���������^�٣�����Ӗ���ӱ��^�١�����ȱ��Ҏ���yһ�ĵ�·���w���³��̶Ȅ��֘˜ʣ�����е��³��̶ȷ����һ�������^���ء�
����3 �YՓ�cչ��
�������������һ�N���������֙C�ĵ�·���w�z�y�c��������������������֙C�z���^�ɼ��ĵ�·���w�D����������ȌW���ķ��������� ResNet50 �W�j�����D���R�eģ�͌���·���w�M�Йz�y���҂��ɼ��� 11853 ����ͬ���l���µĵ�·�D��� 1195 ��܇�v�ڵ�·���w�w�����r�ļ��ٶȈD�����u��ԓ���������ܡ��Y��������ԓ�����ڲ�ͬ���l���¾�����Ч�z�y���w���ʴ_���_ 80.97%;Ȼ�ɼ�܇�v܈�^��·���w�r�ļ��ٶ�ֵ׃����ʹ�ÙC���W���ķ���������֧�������C����·���w�³��̶��M�з������ͬ��͵ĵ�·���w�³��M�з���ʴ_���_ 86%���Y��������ԓ���������^�õķ��·���w�³��̶ȡ�——Փ�����ߣ��w�Ą�1,2,3 ���ĺ�3 �܌���1,2,3,* ���½� 3,4
���������īI
����[1] Arnold E , Al-Jarrah O Y , Dianati M , et al. A Survey on 3D Object Detection Methods for Autonomous Driving Applications[J]. IEEE Transactions on Intelligent Transportation Systems, 2019:1-14
����[2] Yuchuan Du,Chenglong Liu,Yishun Li. Velocity Control Strategies to Improve Automated Vehicle Driving Comfort[J]. IEEE Intelligent Transportation Systems Magazine, 2018, 10(1): 8-18
����[3] ������. ��Դ�b�������ڵ�·���y�еđ���[J]. �y�Lͨ��, 2018(3): 117-121
����[4] Yu Y , Guan H , Ji Z . Automated Detection of Urban Road Manhole Covers Using Mobile Laser Scanning Data[J]. Intelligent Transportation Systems IEEE Transactions on, 2015, 16(6):3258-3269
����[5] �njWȺ,������,�. ܇�d������蔵�����֧���µ�·�攵����ȡ[J]. �y�Lͨ��, 2018(2): 107-110+135
����[6] ������,�R��. ���ܵ�·�z�yϵ�y[J]. �y�L������Ϣ, 2013, 38(2): 74-75+78
����[7] Timofte R , Gool L J V . Multi-view manhole detection, recognition, and 3D localisation[C]// IEEE International Conference on Computer Vision Workshops, ICCV 2011 Workshops, Barcelona, Spain, November 6-13, 2011. IEEE, 2011
����[8] Yu Y , Li J , Guan H , et al. Automated Detection of Road Manhole and Sewer Well Covers From Mobile LiDAR Point Clouds[J]. IEEE Geoscience & Remote Sensing Letters, 2014, 11(9):1549-1553
����[9] Jérôme, Pasquet, Thibault, et al. Detection of Manhole Covers in High-Resolution Aerial Images of Urban Areas by Combining Two Methods[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016
����[10] Kaiyue Zang,Jie Shen,Haosheng Huang, et al. Assessing and Mapping of Road Surface Roughness based on GPS and Accelerometer Sensors on Bicycle-Mounted Smartphones[J]. Sensors, 2018, 18(3)