�l(f��)���r(sh��)�g�����ٷ�����̎��QՓ���g�[��1��
ժ Ҫ�� ժ Ҫ: ���˃�(y��u)�������ܴ�ֱ�Sˮ݆�C(j��)�Ų�����������Ӌ(j��)�����w��(d��ng)���W(xu��)( CFD) �����õ��pˮ݆�C(j��)�ڲ�ͬ�S�g�� H����ͬ����(du��)λ�ý�( RPA) ��ǰ����ˮ݆�C(j��)��ͬ���ٱ� ��ƽ������ϵ��(sh��) CP׃��Ҏ(gu��)�ɣ���������(ch��ng)���ٶȺ͜u���ƈD�����׃���C(j��)����ͬ�r(sh��)����(du��)�ȆΡ��pˮ݆�C(j��)β���ٶȷֲ���
����ժ Ҫ: ���˃�(y��u)�������ܴ�ֱ�Sˮ݆�C(j��)�Ų�����������Ӌ(j��)�����w��(d��ng)���W(xu��)( CFD) �����õ��pˮ݆�C(j��)�ڲ�ͬ�S�g�� H����ͬ����(du��)λ�ý�( RPA) β ��ǰ����ˮ݆�C(j��)��ͬ���ٱ� λ ��ƽ������ϵ��(sh��) CP׃��Ҏ(gu��)�ɣ���������(ch��ng)���ٶȺ͜u���ƈD�����׃���C(j��)����ͬ�r(sh��)����(du��)�ȆΡ��pˮ݆�C(j��)β���ٶȷֲ���r��̽���pˮ݆�C(j��)β�����ԡ��Y(ji��)������: ����ˮ݆�C(j��)̎��ǰ��ˮ݆�C(j��)β���^(q��)��(n��i)�r(sh��)ƽ������ϵ��(sh��)�S�S�g������������̎��β���^(q��)��r(sh��)�pˮ݆�C(j��)�g���^С��ƽ������ϵ��(sh��)�^��; ��ǰ��ˮ݆�C(j��)β����Ӱ푣�����ˮ݆�C(j��)��Ѽ��ٱȕ�(hu��)�S�����x�ͽǶȵIJ�ͬ�l(f��)��׃��; �pˮ݆�C(j��)���e(cu��)�Ų���ƽ������ϵ��(sh��)���چ�ˮ݆�C(j��)����β���ٶ���Ҫ�^�L(zh��ng)�ľ��x�֏�(f��)��
�����P(gu��n) �I �~: ������; ��ֱ�Sˮ݆�C(j��); ��(y��u)������; CFD; ��Ѽ��ٱ�; β������
������ ��
���������ǵ����Ͽ�������Դ����(k��)��������������A(y��)�y(c��)�ԡ������Ժ������ܶȴ�ȃ�(y��u)�c(di��n)��Խ��(l��i)Խ�ܵ���ҕ[1 - 3]����ֱ�Sˮ݆�C(j��)������ȡ�����ܵĺ����b�ã����нY(ji��)��(g��u)��(ji��n)�Ρ��l(f��)늙C(j��)���ú����͟o(w��)��ƫ���C(j��)��(g��u)�ȃ�(y��u)�c(di��n)[4 - 5]�������������w���ܵ��о���(du��)�U(ku��)������ˮ�վ��Ҏ(gu��)ģ���I(y��)�����зdz���Ҫ�Č�(sh��)�Ãr(ji��)ֵ������ߴ�ֱ�Sˮ݆�C(j��)������ܣ���(gu��)��(n��i)�����P(gu��n)�W(xu��)�����_(k��i)չ��һЩ�о�������ɽ����[6]���Ô�(sh��)ֵģ�M���g(sh��)�о����Q�S������ˮ݆�C(j��)������Ų���(w��n)�}���Y(ji��)�������������x������ˮ݆�C(j��)���g����������ˮ݆�C(j��)��Ч�ʣ���(y��u)�����p��ˮ݆�C(j��)�Ų���������������(g��)�C(j��)Ⱥ��Ч�ʡ����P����[7]���� CFD ܛ���о��˲�ͬ�܌�(sh��)���p�C(j��)�M��ֱ�S������ˮ݆�C(j��)�ڲ�ͬ��ʼ��λ���µ�ˮ��(d��ng)�����ܣ��Y(ji��)����������λ�nj�(du��)��ͬ�܌�(sh��)���p�C(j��)�Mˮ݆�C(j��)Ч�ʵ�Ӱ�Ҏ(gu��)�����ơ��x���͵���[8]̽���˲�ͬ�Ų��ɂ�(g��)��ֱ�Sˮ݆�C(j��)���ٱ���ͬ�r(sh��)���ʵ�׃����������һ��(g��)�S�g���µIJ�ͬ�Ų��ǶȺ�һ��(g��)�Ų��Ƕ��µIJ�ͬ�S�g����(du��)���w���ܵ�Ӱ푣������(y��ng)�M�������ˮ݆�C(j��)��ȫ̎��ǰˮ݆�C(j��)β���С�Stephanie Ordonez-Sanchez ����[9] �M(j��n)����һ�N���ͽ������u݆�������ܵČ�(sh��)�(y��n)�������״νo���˙M��ʽ�Μu݆�����N��ͬ�u݆��нY(ji��)��(g��u)�u݆�S���ٶȷֲ��������ٶ�̝ȱ��Ԕ��(x��)�D���Y(ji��)����������ֱ�S�u݆�ڽ�β�Eλ�îa(ch��n)�����ٶ�̝�p��������(qi��ng)�ȸ��ͣ��b�õĎ��Π��cˮ��������(d��ng)�İl(f��)չ��ʹ����β������(du��)�Q��Ji ����[10]�о�?j��)��_(t��i)ˮ݆�C(j��)�ڲ�ͬ���÷�ʽ�µ�ˮ��(d��ng)�����ܣ�����ڃɂ�(g��)���Ŝu݆�C(j��)���ٶ�����^(q��)���������u݆�C(j��)��������������(du��)�ɷN�g���½��e(cu��)�Ų�����r���˺�(ji��n)�η�����Guangnian Li ����[11]�����ֱ�S�u݆�C(j��)��β����(du��)���Μu݆�������кܴ�Ӱ푣��e�Ǵ�(li��n)��(hu��)������Μu݆�Ĺ���ϵ��(sh��)���ڲ��Õr(sh��)��(y��ng)��������ˮ݆�C(j��)̎������ˮ݆�C(j��)β���^(q��)��
�����C���������F(xi��n)���о���ᘌ�(du��)ǰ��ˮ݆�C(j��)���ٱȹ̶��Ҵ�С��ͬ�r(sh��)��ǰ��ˮ݆�C(j��)����(du��)λ�Ì�(du��)����������ϵ��(sh��)��Ӱ푣�����(du��)��ͬǰ��ˮ݆�C(j��)���ٱȌ�(du��)���w����ϵ��(sh��)��Ӱ��о��^�١�Stefania Zanforlin ����[12]�о������������L(f��ng)���C(j��)�����ܵ�ǰ���L(f��ng)���C(j��)��Ӱ푣�����Ѽ��ٱȕ�(hu��)�l(f��)��ƫ�ƣ����e(cu��)���Õr(sh��)�քe��ɂ�(g��)�L(f��ng)���C(j��)�O(sh��)�ú��m�ļ��ٱȿ���ʹ�ɂ�(g��)�L(f��ng)���C(j��)�Ĺ��������ˣ������x�� CFD ��(sh��)ֵģ�M�������о��pˮ݆�C(j��)�ڲ�ͬ�g��ͽǶȵ��Ų��£�ǰ��ˮ݆�C(j��)��ͬ���ٱ�׃����(du��)����ϵ��(sh��)��Ӱ푣����_(k��i)չ��ˮ݆�C(j��)���pˮ݆�C(j��)β���ٶȷֲ��Č�(du��)�ȷ�����
����1 ˮ݆�C(j��)ģ�ͼ� CFD ��(sh��)ֵģ�M
����1. 1 ˮ݆�C(j��)����ԭ�����΅���(sh��)
������ֱ�Sˮ݆�C(j��)��̶�ƫ�����~Ƭ��ֱ�Sˮ݆�C(j��)����Ҫ���D(zhu��n)�S��֧�αۡ��~Ƭ�����������M�ɣ��~Ƭ�؈A�ܾ���ֲ��������~Ƭ�g��� 90°��
����ˮ݆�C(j��)����ԭ��D��D 1 ��ʾ��ˮ݆�C(j��)�����������о���ֱ�Sˮ݆�C(j��)�Ļ��A(ch��)���D 1 �鴹ֱ�Sˮ݆�C(j��)����һ��(g��)�~Ƭ�\(y��n)����ij��(g��)��λ�Ǖr(sh��)�������������돽�� R ��ˮ݆�C(j��)�@����(bi��o)ԭ�c(di��n)���D(zhu��n)�� ω ��r(sh��)����D(zhu��n)�����ٶȞ� U = Rω ����(l��i)�����ٞ� V0���\(y��n)��(d��ng)�^(gu��)�����~Ƭ�c��(l��i)��������(du��)�ٶȞ� W�����x�~Ƭ�Ҿ��c����(du��)�ٶȷ���ĊA�Ǟ��~Ƭ���� α���~Ƭ�ķ�λ�Ǟ� θ����(d��ng)�������^(gu��)���͕r(sh��)���a(ch��n)����ֱ������(du��)�ٶȵ�������ƽ��������(du��)�ٶȵ����������~Ƭ�ϵ����� FD������ FL���~Ƭ�\(y��n)��܉�E�A������͏���ֽ⣬�ɵõ���(g��)�~Ƭ��(du��)����(g��)ˮ݆�C(j��)����������͏������[13]�������������������Ƅ�(d��ng)�~Ƭ�D(zhu��n)��(d��ng)��
����1. 2 ����ģ�ͼ��W(w��ng)��
����Ŀǰ����ֱ�S������ˮ݆�C(j��)�����õ�����ģ�͞� Standard k - ε ����ģ�͡�RNG k - ε ����ģ�ͺ� SST k - ω ����ģ��[14 - 15]��Menter �� 1994 ������� SST k - ω ����ģ�ͣ�ģ��ʹ�û�Ϻ���(sh��)����(bi��o)��(zh��n) k - ε����ģ���c k - ω ����ģ�ͽY(ji��)������(l��i)���ڽ�������� k - ε ����ģ�ͣ����h(yu��n)������� k - ω ����ģ�͡���ˣ�ԓģ�Ͳ��H�����^�ߵĽ�����Ӌ(j��)�㾫�Ⱥ��m��(y��ng)�ԣ�߀�������h(yu��n)��(ch��ng)Ӌ(j��)�マ(y��u)��(sh��)������Ҳ�x�� SST k - ω ����ģ�͌�(du��)��ֱ�S������ˮ݆�C(j��)�M(j��n)������(y��ng)�Ĕ�(sh��)ֵģ�M��
�������]�������췽��Ĵ�ֱ�Sˮ݆�C(j��)�~Ƭ݆������ͬ��������ˮ݆�C(j��)ģ�ͺ�(ji��n)������S���M(j��n)�зǶ�����(sh��)ֵģ�M���ȹ�(ji��)�s�˳ɱ��ִ����Ӌ(j��)��������һ���`�����(n��i)��Y(ji��)���ǿɿ���[16]��������D 2( a) ��ʾ�� 40D × 40D ��������Ӌ(j��)����ˮ݆�C(j��)���D(zhu��n)���Ğ�����(bi��o)ԭ�c(di��n)( 0��0) �����(c��)���(l��i)���ٶ���ڣ��҂�(c��)�鉺�����ڣ�ˮ݆�C(j��)���ľ��ϡ��±���� 20D�����CӋ(j��)�����е�����(ch��ng)������ɰl(f��)չ���������Ӌ(j��)��Ч�ʣ���Ӌ(j��)���֞黥���دB���Ӆ^(q��)�����m��(y��ng)���^��(qi��ng)�ķǽY(ji��)��(g��u)�W(w��ng)��ˮ݆�C(j��)�����D(zhu��n)����D 2 ( a) ��ʾ���������D(zhu��n)��?y��n)�ˮ����ˮ݆�C(j��)����õą^(q��)�龫�_���~Ƭ�����������(d��ng)���������~Ƭ���ͱ����M(j��n)�оֲ����ܣ���D 2( b) ��ʾ�������ھo�N���ͱ����O(sh��)����߅��ӣ��� 1 ��߅��ӾW(w��ng)��߶Ȟ� 0. 01 mm��ͬ�r(sh��)����(du��)����(g��)���D(zhu��n)������˳ߴ纯��(sh��)���ܣ�ʹ�W(w��ng)���ܶ����~Ƭ����������u�pС�������Ք����������^(gu��)�̵ķ�(w��n)���ԡ�
����1. 3 Ӌ(j��)�㷽����߅��l��
�������������w�e��������Z�r(sh��)�����̣���(du��)���(xi��ng)�����^�߷ֱ��ʵĶ��Aӭ�L(f��ng)��ָ�ʽ�������(xi��ng)���������IJ�ָ�ʽ�� SST k - ω ����ģ�͡���(d��ng)�o����̎ʹ�ö�����ϵģ��( MRF) �����ƾW(w��ng)��ͨ�^(gu��)�^(q��)��W(w��ng)��֮�g�Ļ���(d��ng)��(l��i)��(sh��)�F(xi��n)�^(q��)����\(y��n)��(d��ng)���ھW(w��ng)���挦(du��)Ӌ(j��)���еĔ�(sh��)��(j��)�M(j��n)�Ђ��f[17]��
����߅��l���O(sh��)��: ���|(zh��)�鲻�ɉ��s���w����(l��i)���ٶ� 3. 3 m / s��������߅���ٶ����; ���É�������߅��l����������߅�鉺�����ڣ��������ڴ�≺; ������~Ƭ������O(sh��)�Þ�o(w��)���Ʊ���; �o������D(zhu��n)��̎�O(sh��)�齻���棬���D(zhu��n)�^(q��)����D(zhu��n)�ٸ���(j��)ˮ݆�C(j��)�D(zhu��n)���O(sh��)����
����1. 4 �W(w��ng)��o(w��)�P(gu��n)���(y��n)�C
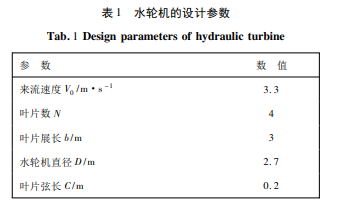
������(du��)��(g��)���~Ƭ NACA0018 ���͵Ĵ�ֱ�Sˮ݆�C(j��)�M(j��n)�оW(w��ng)�֣��o�����ٱȞ� 2. 5�����ò�ͬ�W(w��ng)��(sh��)�քe���� 23 �f(w��n)��33 �f(w��n)��45 �f(w��n)�� 54 �f(w��n)�W(w��ng)���M(j��n)�оW(w��ng)��o(w��)�P(gu��n)���(y��n)�C��ͬ�r(sh��)�����־W(w��ng)��(sh��)һ�����(y��n)�CӋ(j��)���_(d��)����(w��n)�B(t��i)�r(sh��)����Ҫ�ĵ�������(sh��)���Y(ji��)����D 3 ��ʾ�����Կ�������(d��ng)�W(w��ng)��(sh��)�_(d��)�� 45 �f(w��n)��ˮ݆�C(j��)�Ĺ���ϵ��(sh��)�ѻ������ܾW(w��ng)��(sh��)����Ӱ푡���(d��ng)?sh��)������?sh��)���_(d��) 864 ���r(sh��)��ˮ݆�C(j��)����ϵ��(sh��)�������ٸ�׃��Ӌ(j��)������_(d��)����(w��n)�B(t��i)������x���������(sh��)�� 864 ����
����1. 5 ���ˮ݆�C(j��)����ģ�ͼ�Ӌ(j��)����
�������pˮ݆�C(j��)����І�λ��ͨ�^(gu��)ˮ݆�C(j��)�S�g�� H ������(du��)λ�ý� β �_����ˮ݆�C(j��)������(du��)λ�ã��о�ƽ������ϵ��(sh��)���pˮ݆�C(j��)���ٱ� λ ��ͬ����r�£��Sˮ݆�C(j��)��ͬ�g�������(du��)λ�ý�׃����Ҏ(gu��)�ɡ���D 4 ��ʾ��
�����D��ˮ݆�C(j��)�S�g�� H ��ʾ�pˮ݆�C(j��)���D(zhu��n)���ĵľ��x������(du��)λ�ý� β ���pˮ݆�C(j��)���D(zhu��n)�����B���c Y �S֮�g�ĊA�ǡ�ǰ��ˮ݆�C(j��)�@������r(sh��)����D(zhu��n)������ˮ݆�C(j��)�@����형r(sh��)����D(zhu��n)����(d��ng)����(du��)λ�ý� β ̎�� 0° �� 90°֮�g�r(sh��)���齻�e(cu��)���ã�ˮ݆�C(j��)�Y(ji��)��(g��u)����(sh��)���ֲ�׃���pˮ݆�C(j��)�C(j��)�M��Ӌ(j��)����?y��n)?50D × 40D�����߅����xǰ��ˮ݆�C(j��)���D(zhu��n)���ĵ��g���� 10D������߅����xǰ��ˮ݆�C(j��)�����D(zhu��n)���Ğ� 40D���pˮ݆�C(j��)���õľW(w��ng)��(sh��)��߅��l���cǰ��������ˮ݆�C(j��)ģ�� һ �£�����Ӌ(j��)����U(ku��)�W(w��ng)��(sh��)���ӵ��s 55 �f(w��n)��
����2 Ӌ(j��)��Y(ji��)��������
�������ں���ˮ݆�C(j��)��ѹ������ٱȿ�����ǰ��ˮ݆�C(j��)β���ĸɔ_�a(ch��n)��׃��������ڱ���ǰ��ˮ݆�C(j��)���ٱ� λ1�� 2. 5 ��ǰ���£�����ˮ݆�C(j��)���ٱ� λ2�քe�x��� 1. 75��2. 0��2. 25 �� 2. 5 4 �N��r�£�չ�_(k��i)���x���ǶȺͼ��ٱȌ�(du��)����ϵ��(sh��)Ӱ푵��о���
����2. 1 ���e(cu��)�Ų�ˮ݆�C(j��)�g����(du��)ƽ������ϵ��(sh��)��Ӱ�
����ǰ��ˮ݆�C(j��)�c����ˮ݆�C(j��)��ƽ������ϵ��(sh��) CP �Sˮ݆�C(j��)�g�� H ׃����������D 5 ��ʾ���ɈD 5 ��֪��λ2 �� 1. 75��2. 0 �� 2. 25 �r(sh��)��β �� 30°��45°�� 60°��r�� CP�S�g�� H ��׃��څ��(sh��)������ͬ��H = 2. 5D ֮ ǰ څ �� ��(w��n) ����H = 2. 5 D ֮ ����������; β �� 75°�� 80°�r(sh��)���S�� H ���� CP����ͬڅ��(sh��)��������
������(d��ng) λ2�� 2. 5 �r(sh��)���� β �� 30°��45°��60°����r�£� H = 2. 5D ֮ǰ CP�S H �����������pС�������Ҳ�ͬ β �� CP��(sh��)ֵ������@; β �� 75°�� 80°�r(sh��)��CP�S H ������Ǿ�������; H = 2. 5D ֮��CP׃��څ��(sh��)�c λ2�� 1. 75��2. 0 �� 2. 25 �r(sh��)���w���ơ�
������(du��)�ȷ��� 4 �N λ2�µ� CP��֪��β �� 30°��45°�� 60°�r(sh��)��H = 2. 5D ��Ӱ�ˮ݆�C(j��)���w����ϵ��(sh��)���D(zhu��n)���c(di��n)��β �� 75°�� 80°�r(sh��)���pˮ݆�C(j��)֮�g���g��Խ��Խ�á�
�������f(shu��)����ͬ�g��Ӱ��p��ֱ�Sˮ݆�C(j��)����ϵ��(sh��)��ԭ��(du��)�ȷ��� λ2 = 2. 25��β = 60°�r(sh��)����ͬˮ݆�C(j��)�g�� H ������(ch��ng)���ٶ��ƈD����D 6 ��ʾ����(d��ng) H = 3D �r(sh��)���pˮ݆�C(j��)β���^(q��)���(d��)��������ˮ݆�C(j��)β���ς�(c��)�����م^(q��)���cǰ��ˮ݆�C(j��)β����(c��)�����م^(q��)���غυ^(q��)���^С�����g�^(q��)���ٜpС��CP��С����(d��ng) H = 2D �r(sh��)���pˮ݆�C(j��)��ֱ�ځ�(l��i)��������g���� D�����ڃ�ˮ݆�C(j��)���x�^��������ˮ݆�C(j��)β���ς�(c��)�����م^(q��)���cǰ��ˮ݆�C(j��)β����(c��)�ĸ����م^(q��)���غυ^(q��)�������ǣ����ڃ��~݆�C(j��)���x̫��������ˮ݆�C(j��)�ς�(c��)β�������م^(q��)�M(j��n)��ǰ��ˮ݆�C(j��)β�������م^(q��)����(d��o)���p�~݆�Ĺ���ϵ��(sh��)����(y��ng)���ӡ��S�� H �������pˮ݆�C(j��)��ֱ�ځ�(l��i)��������g������H = 2. 25D �r(sh��)����ˮ݆�C(j��)�ς�(c��)β�������م^(q��)�x�_(k��i)ǰ��ˮ݆�C(j��)β�������م^(q��)�����~݆֮�g���������ӣ�CP������ߡ�H = 2. 5D �r(sh��)���~݆֮�g�����م^(q��)�M(j��n)һ������CP ֵ�_(d��)�����
����2. 2 ���e(cu��)�Ų�ˮ݆�C(j��)����(du��)λ�ýnj�(du��)ƽ������ϵ��(sh��)��Ӱ�
�����D 7 ��ǰ��ˮ݆�C(j��)�ͺ���ˮ݆�C(j��)��ƽ������ϵ��(sh��) CP�S����(du��)λ�ý� β ��׃���������ɈD��֪��λ2�� 1. 75��2. 0 �� 2. 25 �r(sh��)��CP �S���Ƕȵ����������(d��ng) β < 60°��CPֻ�м�(x��)�ĜpСڅ��(sh��); ��(d��ng) β > 60°��CP�@���pС��H Խ�� CP�pС��Խ����
�����ֶ� λ2 = 2. 5 �r(sh��)��H = 2D��2. 25D��2. 5D �� 7D ����r�� CP�S β ��������pС����(d��ng) β < 60°��CP�pС�����^��; ��(d��ng) β > 60°��CP�pСڅ��(sh��)����(d��ng) H = 3D �r(sh��) CP�S β �������������pС���ҷֽ��c(di��n)Ҳ��β = 60°��
�����C���������pˮ݆�C(j��)���e(cu��)�Ų��r(sh��)��β = 60°��Ӱ푹���ϵ��(sh��)��һ��(g��)��Ҫ�D(zhu��n)���c(di��n)���� β < 60°�r(sh��) CP�^�ߣ� β > 60°�r(sh��)����ˮ݆�C(j��)̎��ǰ��ˮ݆�C(j��)β���^(q��)�ĵ��م^(q��)����β��Ӱ� CP�@�����͡����S���g���������ˮ݆�C(j��)�cǰ��ˮ݆�C(j��)��β���^(q��)���(d��)����Ӱ표pС��
������(du��)�ȷ����� λ2 = 2. 25��H = 2 D �r(sh��)����ͬ����(du��)λ�ý� β ������(ch��ng)���ٶȣ��ٶ��ƈD��D 8 ��ʾ����(d��ng) β �� 30°��45°�� 60°�r(sh��)���S�� β ��u�����pˮ݆�C(j��)���g�����م^(q��)����e�p�٣��Һ���ˮ݆�C(j��)��ǰ��ˮ݆�C(j��)β��Ӱ���u���أ�CP �_(k��i)ʼ�ܵ�Ӱ푡���(d��ng) β �� 75°�� 80°�r(sh��)���pˮ݆�C(j��)���g�^(q��)��?y��n)�ǰ��ˮ݆�C(j��)β�������م^(q��)�c����ˮ݆�C(j��)β���ς�(c��)�����م^(q��)���غυ^(q��)����ˮ݆�C(j��)��λ��ǰ��ˮ݆�C(j��)β�������م^(q��)����ǰ��ˮ݆�C(j��)β����Ӱ푸��Ӈ�(y��n)�أ�ˮ���ٶȺܵͣ���ɺ���ˮ݆�C(j��)���ܘO���½���CP�����½���
����2. 3 ���e(cu��)�Ų�ˮ݆�C(j��)���ٱȌ�(du��)ƽ������ϵ��(sh��)��Ӱ�
�������� λ1 = 2. 5 ��׃��ˮ݆�C(j��) 1 ��ˮ݆�C(j��) 2 ��ƽ������ϵ��(sh��) CP�S λ2��׃����������D 9 ��ʾ���ɈD��֪��β �� 30°��45° �� 60° �r(sh��)����� λ2 �� 2. 25���� λ2 < 2. 25 �r(sh��)��CP �S λ2 �����������; �� λ2 > 2. 25 �r(sh��)��CP�����pС���� H �� 2. 5D �� 3D �r(sh��)���pСڅ��(sh��)�������� H �� 2D��2. 25D �� 7D �r(sh��)�pС���^�鄡�ҡ�
������(d��ng) β �� 75°�� 80°�r(sh��)����� λ2�� 2. 0��H �� 2. 5D �� 3D �r(sh��)��CP�ܼ��ٱ�Ӱ��^С������ϵ��(sh��)�����^��ƽ�����˕r(sh��)ˮ݆�C(j��)�Ĺ����������^�V��; �� λ2�� 2. 0 �r(sh��)��H �� 2D��2. 25D �� 7D �r(sh��)��CP�pСڅ��(sh��)�^���ɴ˿�Ҋ(ji��n)����(d��ng)�pˮ݆�C(j��)���e(cu��)�Ų��r(sh��)�������x�����ˮ݆�C(j��) 2 �ļ��ٱȣ������@��� CPֵ��
����2. 4 �pˮ݆�C(j��)�c��ˮ݆�C(j��)β�����ԵČ�(du��)�ȷ���
��������ǰ��W(w��ng)��o(w��)�P(gu��n)���(y��n)�C��֪����ˮ݆�C(j��) λ = 2. 5 �r(sh��)��ƽ������ϵ��(sh��)�� 0. 4�����ڶ���(sh��)��r���pˮ݆�C(j��)���e(cu��)�Ų���ƽ������ϵ��(sh��)���� 0. 4������������ߡ��������pˮ݆�C(j��)�����x�Ų��r(sh��)β����ɔ_��ʹ����β���ٶȻ֏�(f��)��r�c��ˮ݆�C(j��)��ͬ�����]����ˮ݆�C(j��)����Ų��У�����ˮ݆�C(j��)���ʕ�(hu��)�ܵ�����ˮ݆�C(j��)β����Ӱ푣�������M(j��n)һ��̽���pˮ݆�C(j��)�Ų��r(sh��)��β�����ԡ�
�����քe�xȡ��ˮ݆�C(j��) λ �� 2. 5���Լ��pˮ݆�C(j��)�g�� H = 2D��β �� 60°��λ1�� 2. 5��λ2�� 2. 25 �r(sh��)�\(y��n)�з�(w��n)���c(di��n)��β���ٶ� V /��(l��i)���ٶ� V0�������D���^��β���ٶȻ֏�(f��)��r����D 10 ��ʾ���ɈD 10( a) ��֪��β���^(q��)�����x 1D �� 10D ��(n��i)��ˮ݆�C(j��)�����������ֻ�֏�(f��)����(l��i)���� 20% �� 30% ; 15D �� 20D ̎���ٶ���ȁ�(l��i)�����^�ͣ����� 20D ���ˮ݆�C(j��)β���ٶȻ֏�(f��)����(l��i)���� 80% ���ɈD 10( b) ��֪��ǰ��ˮ݆�C(j��)��β���ٶȻ֏�(f��)�^�ã�����ˮ݆�C(j��)��β�������م^(q��)�����ǰ��ˮ݆�C(j��)���Ҳ�ͬӛ�λ���ϵ��ٶȶ�����(du��)�^�͡��Y(ji��)�ψD 6 �͈D 8 �pˮ݆�C(j��)�ٶ��ƈD��֪��ǰ��ˮ݆�C(j��)�ĵ��م^(q��)�cˮ݆�C(j��) 2 �ĸ��م^(q��)��ںϣ��ں���ˮ݆�C(j��)��Ӱ��£�ǰ��ˮ݆�C(j��)�� 1D �� 10D ��(n��i)�����ٱȆ�ˮ݆�C(j��)����˴�s 10% ��������������ٻ֏�(f��)����(l��i)���� 40% ���ҡ��� 10D ���pˮ݆�C(j��)���ٶ��Ȇ�ˮ݆�C(j��)�ͣ�30D ���pˮ݆�C(j��)β���ٶȻ֏�(f��)����(l��i)���� 80% ���ϡ�——Փ�����ߣ��ڕ�(sh��)��1 ��� ��1 ��������2 ���� ��1