�l���r�g�����ٷ�����̎��QՓ���g�[��1��
ժ Ҫ�� ժ Ҫ�����|�W����늹���늚⻯�F·���ϵ�y�е���Ҫ�M�ɲ��֣����й��W֮�g�ĄӑB���|���DZ��C����C܇�����������P�I�l�������Ԍ������õĹ��W�Pϵ���F·���ϵ�y�OӋ��һ�����c�����]��Ŀǰ���W���|�������ý��|ʽ�z�y�ֶΣ����ڷǽ��|�z�y���о������^�٣������
����ժ Ҫ�����|�W����늹���늚⻯�F·���ϵ�y�е���Ҫ�M�ɲ��֣����й��W֮�g�ĄӑB���|���DZ��C����C܇�����������P�I�l�������Ԍ������õĹ��W�Pϵ���F·���ϵ�y�OӋ��һ�����c�����]��Ŀǰ���W���|�������ý��|ʽ�z�y�ֶΣ����ڷǽ��|�z�y���о������^�٣���������һ�N���ڈD��̎���㷨�z�y���W���|�����·�����������늹����^�Y���������˹��W���|���c���^λ��֮�g���Pϵ���������W���|��Ӌ��ģ��;���ڹ��W���ģ�Mԇ��_�M�е�����C�����ȣ����ÈD��̎��ģ�K���ɼ����ĈD���M�И�ӛ�c��Ŀ�˸�ۙ�c������ȡ;Ȼ��ͨ�^����̎��ģ�K���õ���λ����Ϣ�Mһ�������õ����^���ٶȵ���Ϣ�������õ����ٶ���̖;������^�T������������������Ľ��|���Y���M�з������Y��������ͨ�^�D��̎��z�y�õ��Ĺ��^λ�����y���`��H�� 1.3mm�������^��;ͬ�r�z�y�õ��Ĺ��W�ӑB���|�������ֵ��ƽ��ֵ�͘˜ʲ����������`��H�� 5.46%��5.15%�� 4.58%���y���`���^С���Y���C���˷����z�y���W���|���ǿ��еģ��ҙz�y���ȝM��Ҫ��
�����P�I�~����늹�;���|�W;���|��;�D��̎��;�C��ҕ�X;ģ��ƥ��
�����������õĹ��W�Pϵ�Ǵ_�����Wϵ�y��ȫ������Ҫ�Ĺ���������A�Ĺ�������Ҫ�����Wϵ�y�M�Ќ��r����Ч���ʴ_�ęz�y��������ֱ�ӷ�ӳ���Wϵ�y�����|���Ĺ��W�g�ĄӑB���|��[1]�����Ǚz�y�е�����֮�ء����˺������u�����Wϵ�y�ӑB���������ܣ���Ҫ���r�����W�g���|���M�Мʴ_�ęz�y��
�������y�Ľ��|�����z�y��Ҫͨ�^���b�ڹ��^�����֧���g�����������ͼ��ٶȂ�������ɵ�[2]���Թ��^���P��ƽ�ⷽ�̞���A��ͨ�^���������y�õ���������ͼ��ٶȵõ��đT��������K�õ�������Ĺ��W���|��[3,4,5]���@�N�z�y��ʽ�����˙z�yЧ�ʣ������Â������z�y��ȱ�c���ڙz�y�O���һ��ᘌ���ͬ�Ĺ�����Ҫ���b��ͬ�ęz�y�O�䣬���Ұ��b����늹��ϵĂ�����Ҳ��Ӱ���늹��ĄӑB���ԡ�
��������Ҳ���S���W���ڂ��y�������z�y�Ļ��A��������ù��w�yԇ�ķ����������īI[6,7]ͨ�^�ڹ��^���尲�b���w��׃Ƭ�����������ڑ�׃푑��c���^�d��֮�g��ӳ���Pϵ�y�����W���|�����˷N�z�y��ʽ��ȱ�c������Ҫ��׃��늹��Ĺ��^�Y���������ڹ��^�ϼ��b��׃Ƭ�ęz�y��ʽ���m��܇�v���L�ڠ�B��ۙ;Ҳ�������W��MAICZ D����ͨ�^�����y����������Q����wʽ���������y�����|��[8]���˷N�z�y��ʽ���c���ڿ�����Ч�˷�늴Ÿɔ_�Ȇ��}�����Ǿ������^��ֻ��ᘌ�ijһ�N�ض���늹���ͨ���Բ
�����S��Ӌ��C���g�͈D��̎�����g�İlչ���ǽ��|ʽ���W�z�y���g���ٰlչ������W��Ebru Karakose ����ͨ�^߅���z�y��ֱ���z�y�ȷ�����ȡ���W���|�cλ�ã��Ķ��õ�܇�v������ֵ��Ϣ�������M����܇��B�z�y�����A��[9];�īI[10,11]�в���CCDP ׃�Q������������D��������ͨ�^����׃�Q�z�y�������Ѽy;Kyung‑Min Na����ͨ�^�����W�D���M��ģ��ƥ��ͻ���׃�Q�z�y�Á��Д���늹��c픲����|��֮�g�Ľ��|��B[12]���������y�ĈD��z�y������Ҫ������߅���z�y��ֱ���z�y�������ڹ��W���s�ĽM����������Ϣ��������Ч���R�e��ᘌ����s��r�ęz�y��Hyungchul Kim����ͨ�^R-CNN��ȡ�����ROI��������С���˷��ͼ��⾀�z�y�����ĥ�p�ߴ�[13];Aydin, I���˻��ڈD��̎����ģʽ�R�e�ķ������@�õ������ṩ�oD-Markov�Ġ�B�C�������R�e��늹�������^���늻��ȹ���[14];Shen Yuan ��������KCF��ۙ�Y���ݶ�ֱ���D������λ��ܣ�ʹ�ø��M��RefineDet�W�j�z�y���Ǻͻ�ͨ�^�D�������ؽ���늹����w�����S܉�E[15]��
�����ͬF�еĹ��W���|���z�y�������ԣ����y�z�y������Ҫ��׃��늹��Y������������b�����㣬�����ڷǽ��|ʽ�Ľ��|���z�y�����о��^�١���ˣ��������һ�N���ڈD��̎�����g�Ĺ��W�ӑB���|���z�y���������Ա����׃��늹��Y������Ӱ�������W���ܣ����܌��F�L�ڸ�ۙ���ۣ��z�y�����^�ߣ�������F·���Wϵ�y�İ�ȫ�\���ṩ�˼��g���ϡ�
����1 ���|���z�yԭ��
����1.1 �yԇԭ��
�������˜p���о�׃��������y������������늹����弰���^֧�ܽM�ɵĹ��^�Y�����о���������ԇ���d������l���^�ͣ����Ԍ����^�Y��ҕ�鄂�w�����ÈD��̎�����g�R�e��ӛ�c������λ����Ϣ���@ȡ���^�����λ�ƣ������^���ɵ�׃�������Mһ��ͨ�^����̎�������õ����^����Ӽ��ٶȣ����ڹ��^����ƽ�ⷽ�̏Ķ��õ����W�g�ĄӑB���|����
�����D1չʾ����늹��ķ���ģ�͡����������������|��Fc�����^����Ϳ���g�ă���Fb�������Fa��������Fξ�͑T����Fi����ˣ����^��ƽ�ⷽ�����£�
����2 ��늹�����
����2.1 ����
����������Cͨ�^�D��̎�����g�z�y���W���|�������Ŀ����Ժ͜y�����ȣ����Ļ���ij�������c����ҵĹ��W���ģ�Mԇ��_�M���˶�M�ӑB���o�B��늹�������w����Ҋ�D2�����ЄӑB���d���r�Ĺ��r�飺�����l�ʞ�2.4Hz�������õ���늹��� favelai �λ�����늹�;����늹��v����λ�ã����2030mm̎���bһ�_CCD���ٹ��I���C (���أ�1920×1080���ɘ��l�ʣ�140fps)���ڈD��ɼ�;����늹��·�����λ�÷քe���b���a���������߲ɼ��DƬ���|�������ں��m�������ڻ������늹���ܵăɂ�(֧�Ώ�������)�����ڻ������Č��Qλ�÷քe�O���˘�ӛ�c���ڈD���R�e����ӛ�c�Π�Ҋ�D3��
�������⣬��ԇ�քe�ڹ��^�����֧�Ώ����ϰ��b�˸߾��ȵ���������������λ�Ƃ������ͼ��ٶȂ��������������O��IJɼ��l���cCCD���C�ɼ��DƬ�Ď����{��һ�£��@��ͨ�^���ɵõ��Ľ��|���Ϳ��Á�����D��̎���Y������C��
����2.2 �P�I�����˶�
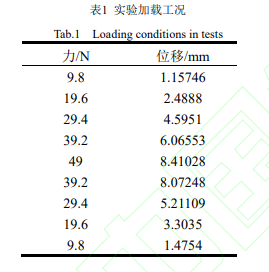
�������Ì���1.2�еĵ�Ч�|��m�͵�Ч����k�M�И˶����y����Ч�|���r����ܲ��̶ֹ���ֻ�������^���֣��ڹ��^�Ϸ�����Һ�����o�B���d���o�B�����d���rҊ��1�������ڹ��^�ϼ��d����0�� 9.8N��19.6N��29.4N��39.2N��49N���ٷ�����d��ȥ�γ��]�h��ӛ���ÿ�μ��d֮��λ�Ƃ������Ĕ�ֵ���L�Ƴ�F-X�D��(��D4a)�M��ֱ���M�ϵõ���Ч����k��
�����y����Ч�|���r��������˥�p��[16]������늹���ܲ��̶ֹ����ڹ��^����λ��ʩ��һ����ʼλ�ƣ�������˥�p��ӣ�ͨ�^λ�Ƃ������y�����λ���S�r�g˥�p��׃���D��(�D4b)���ɈD��õ�ϵ�y���������T������ʽ(6)�������Ч�|��m��
����3 �D��z�y���|������
�������ÈD��̎�����g�y�����W���|�������c���y������֮ͬ̎����ͨ�^�㷨�Ԅӌ���ӛ�c�M�����ؼ��ĸ�ۙ�c��λ���@ȡ��ӛ�c�����λ��;�M��ͨ�^��ӛ�c��λ��׃���_�����^��λ�ơ����^����ٶȺ��^��Ӽ��ٶȡ����ژ�ӛ�c�ڹ��^���ɵ�����λ�ã����Կɸ���ÿ����ӛ�c��λ��׃���õ����^���ɵ���׃����Ȼ��õ����Ƀ���;�ɹ��^��Ӽ��ٶ��c���^����ٶȵõ����^�T������������;�����ڹ��^��ƽ�ⷽ�̵õ����|����
�������Ļ���Ӌ��Cҕ�X��λ�ƙz�yϵ�y�����̿�D��D5��ʾ��(1)�����{ԇ���C���������x��������ϵ����������ϵ��Ȼ�������O���õ����C����늹���ӈD���ɼ��õ�����늹��������M�лҶ�̎������ֵ�V�����A̎�������Խ������ڹ⾀�����ĸɔ_;(2)�əz�y�ĵ�һ���D������ӱ��D����ȡ��ӛ�c��ƥ��ģ�壬֮�������늹���ӈD��ֶ�λ���Ԅӽ�ȡ����ӛ�c��Ӆ^���ӈD;(3)��ͨ�^ģ��ƥ��(Template matching)�㷨Ӌ��ģ���c�ӈD�g�����ƥ���`����һ����P�����ą^��ӛ�cλ��;(4)����ÿ���D�И�ӛ�c��λ�ã����D���е����������D�Q����������λ�ü��ɵõ����^������λ��׃��������
����3.1 ϵ�y�M��
��������Ӌ��Cҕ�X��λ�ƙz�yϵ�y�M����D6��ʾ��������Ҫ�����߾��ȡ��߷ֱ��ʵĹ��I�������C��LED�a��������^��ӛ�c�͔�������Ӌ��C�����ȣ�ͨ�^���C�@ȡ���^��ӛ�c�ĈD��;Ȼ�D�W����ݔ��܇�ϵĔ�������Ӌ��C�M�Ѓ�����ɺ��_ܛ���M�Ќ��r̎����
����3.2 ���C�˶�
���������ڱ��Ό���И�ӛ�c������λ�Ɯy���H���ڴ������λ�Ɯy�������Կ��Ժ������C�˶�������ʹ�ó߶��������C�˶���[17]��
����3.3 Ŀ�˸�ۙ�c������ȡ
�������]����ͬ�⾀���Ȍ��D��Ҷ�ֵ��Ӱ��Լ���ӛ�c�Π������ȡ��Ӱ푣����Ļ���ģ��ƥ���㷨(Template matching)�M�И�ӛ�c��λ�������A�ȷ��x����ģ���cԭ�D�M�б��^���Կ��ٴ_������ӛ�c��ԭ�D�е�λ�ò���ȡԓ�^��
����4 ԇ�Y��������
����4.1 λ�Ɯy���Y��
�����������ĵ���ԇ���C�^���У��D���R�e��λ�ƽY���cֱ��������λ�Ƃ�����(���Ծ��ȣ� 0.05%FS���ɘ��l�ʣ�140Hz )�y�õ�λ�ƽY��������D 9 ��ʾ���D���R�eλ�ƕr�gҊ�� 2��
����ͨ�^���^����λ�Ƶ��R�e�Y�������Կ���ͨ�^�D��̎�����g�@�õĘ�ӛ�cλ�ƽY���c����λ�Ƃ������@�õ�λ�ƽY���`���^С����������`��H�� 1.3mm������߀ԭ�˹��^����ӕr���\�Ӡ�B�����ԝM����mӋ�㹭�^���ٶȺͽ��|����Ҫ���ҽ�ǰ�ڈD��ֶ�λ��Ӌ���ٶ������˽� 29 ����ÿ 0.00939 ��z�yһ����Ƭ����������˙z�y�Č��r�ԡ�
����4.2 ���ٶ�����
���������ڈD��IJɼ���̎���^���У��õ��Ĺ��^λ����Ϣ�������B�m�ģ�����ͨ�^��ͬ�IJɘ��l�ʵõ��������B�m���xɢ�c��ᘌ���˲��m�����}�����xɢ��λ��Ӌ�㹭�^���ٶȕr�õ��˔�ֵ�ֽⷨ��ᘌ���ֵ���^���г��F���`��Ŵ��}������ͨ�^�M�ж����l���µIJ�ͬ�V�����ԵČ��ȣ��猦��һ���ֽY���M�ОV��(��ͨ 0.05~0.13������ 0.95���莧˥�p 60dB)��Ȼ�V���ĽY�����M�ж����ֻ���ֱ�ӌ������ֵĽY���M�ОV��(��ͨ 0.09������ 0.95���莧˥�p 60dB)���V����ĽY���c���ٶȂ������y�õĽY������Ҋ�D 10����Ҋ��ֱ�ӌ������ֺ�ļ��ٶ���̖�M�ОV��Ч����ã��õ��ļ��ٶ���̖���ʴ_��
����4.3 ����������
��������늹��ӑB���d����У����W�g���|�����Ĝy�����ܵ���������Ӱ푣�����ʹ�y���Y�����Ӿ��_�������M���������������� 2.2 ���е�ʽ(8)Ӌ��������������������ǰ��Č��Ȕ���Ҋ�D 11���ɈD�пɿ�����������������Ľ��|���c�������|���Ǻ϶ȸ��ߣ����ӽ����H��r��
����4.4 ���W�ӑB���|����C
�����������yԇ�õ��Ĺ��^����λ�ƺͼ��ٶ���Ϣ���ɹ��^��ƽ�ⷽ��Ӌ��ó����W�g�ĄӑB���|����С�����ɱ�������ĈD��̎�����g�z�y�õ��Ľ��|���c���H���|�����ȣ���D 12 ��ʾ��
�������ā�Դ�ڣ������Ͻ�ͨ��W�W����(�p�¿�)������1954�꣬�O�У��������Փ�о��������о�������о����W�gӑՓ�ȷ���ČW�gՓ���Լ��Ƽ���Ϣ����ș�Ŀ��
�������� GB/T 32592-2016[18]���քe���Ƿ]�T�������Ƿ]����������r���D��z�y�Ľ��|���͌��H���|�����˱��^�����ȽY��Ҋ�� 3��
�����ı� 3 ���Կ����������]�T���������r���y��ֵ�c���Hֵ�Ľ��|����e�^���������ֵ���˜ʲ�������`���_���� 15.58%��52.84%���`���ѽ����ݺ�ҕ�����Ԝy�����|�����r��횿��]�T������Ӱ푡������]�����������r���Ĕ����������ڹ��W���|������Ӱ����^�ڑT�������f�^С�����ֵ�͘˜ʲ�������`��� 4.54%�� 5.94%��
���������M���ˑT������������������Ĕ������ɈD 12 ���Կ���ͨ�^�D��̎�������z�y���Ľ��|���c���Hֵ�IJ����Ǻ϶��^�á�����ᘌ��D 12 �оֲ����F��˲�B�z�y�`�����`��� 5N���Ɍ��ȈD�п������ÈD��z�y���Ľ��|�����ھֲ����F���l�z�y�`����`��������ͨ�^λ���ֵõ����ٶȵ��^���Юa���ĸ��l��̖���ı� 3 �yӋֵ�п��Կ������z�y�ĄӑB���|�����Ę˜ʲ��� 16.20 ���ң��c���Hֵ���`��H�� 4.58%���������ֵ��ƽ��ֵ����������`��H�� 5.46%�� 5.15%���hС�ڙz�y�`����Ҫ��� 10%���ɴ��f��ͨ�^�ǽ��|ʽ�ĈD��̎�����g�z�y���W�g���|�����ķ�������Ч�ġ�
�����@����Ҫע������mȻ�� 3 ����Сֵ���`���^����ԭ�����ڱ���ԇ��ӑB���dԇ�]�п��]���W�g���A���d�������Ԝy������Сֵ���^С���������f��ɵ������`����^����Ӱ푴˷��� �y���Ĝʴ_�ԡ�
����5 �Y Փ
���������һ�N���ڷǽ��|ʽ�ĈD��̎�����g�����W�g���|�����z�y���·������c���y�ęz�y������ȣ�ԓ�����O�䰲�b���Ρ����Ќ��r�Ժͷǽ��|�Ե����c�����Ա���z�y�r����늹����^�M�и��졢���C��ԭʼ�ĄӑB����;ͬ�r�����Ԅӻ������ܻ����z�y�`��ȸߣ��ʴ_�Ը�;������܇�ɔ_С���m�����L���x���L�r�g�ͭh���l�������µ��B�m��ۙ�z�y��ͨ�^��M����ӑB����C�˴˷�������Ч�Ժ͜ʴ_�ԣ��ڽ��^�T������������������֮��z�y�����h�h�M�㹭�W���|���ęz�y���ȣ��Mһ���S����Ŀǰ�ڷǽ��|ʽ�y���I�W���|���z�y�������о���ͬ�r���Ԟ鹭�W�����|�����u���͌��r���ϱO�y�ṩ�ʴ_�Ľ��|��������
�������]�����W�ڌ��H�\�Еr���s�h����r�͏��s�����ĸɔ_����α��C�D��̎���㷨�ڏ��s�����l���£����L�r�g�ع�ͮ����ړ���ӛ�c�r����Μʴ_���ٵ��R�e���^λ�ƣ���ο��]��늹���������׃�κ̈́ӄ��ȵ����ص�Ӱ푌��Ǻ��m�о������c��——Փ������:�܌� 1 �������| 1 �����Sƽ 1 ���� 1 �����G 2 �������� 3 �����l�A 1
���������īI:
����[1] ��־��,����,�n��,��. �����F·���|�W�о��Mչ[J]. ���Ͻ�ͨ��W�W��, 2016,51(03):495-518. LIU Zhigang, SONG Yang, HAN Ye, et al. Advances of research on high-speed railway catenary[J]. Journal of Southwest Jiaotong University, 2016, 51(03): 495-518.
����[2] �܌�,ε��,�T���f,��. ���Wϵ�y�ӑB���������ܜyԇ���g�о�������[J]. �F���W��, 2020,42(03):47-54. ZHOU Ning, WEI Chao, TAN Mengying, et al. Investigation on and Application of Measurement Technology of Dynamic Performance and Current Collection of Pantograph-catenary System[J]. Journal of the China Railway Society, 2020, 42(03): 47-54.
����[3] ������,�ߕ���,����,��. ���W���|���z�y������B[J]. �F�����g�O��, 2010,38(08):11-13+16. ZHANG Xiaolin, GAO Xiaorong, WANG Li, et al. Introduction on the Detection of Pantograph Catenary Contact Force[J]. Railway Quality Control, 2010, 38(08): 11-13+16.
����[4] ����,����,�ߕ���,��. ��늹��c���|�W�g�Ľ��|�����z�y�о� [J]. ����C܇�c��܉܇�v , 2006(06): 19-21+54. LIU Fang, WANG Li, GAO Xiaorong, et al. Study of Measuring the Contact Force Between Pantograph and Catenary[J]. Electric Locomotives & Mass Transit Vehicles, 2006(06): 19-21+54.
����[5] ������,�쳬,�����. ���W�ӑB���|�����y�������о�[J]. �F�����g�O��, 2014,42(12):41-43. WANG Yachun, XU Chao, YANG Caizhi. Research on the Measurement Method of Pantograph-Catenary Dynamic Contant Force[J]. Railway Quality Control, 2014, 42(12): 41-43.
����[6] �T���f,�u��,����ƽ,��. ���ڑ�׃푑��y�����W���|�����·��� [J]. ���Ͻ�ͨ��W�W�� , 2017,52(06): 1208-1215. TAN Mengying, ZOU Dong, LI Ruiping, et al. New Contact Force Measuring Method for Overhead Catenary Systems Based on Strain[J]. Journal of Southwest Jiaotong University, 2017, 52(06): 1208-1215.
����[7] SCHRÖDER K, ECKE W, KAUTZ M, et al. An Approach to Continuous On-site Monitoring of Contact Forces in Current Collectors by a Fiber Optic Sensing System[J]. Optics and Lasers in Engineering, 2013, 51(2): 172-179.
����[8] WAGNER R, MAICZ D, VIEL W, et al. A Fibre Optic Sensor Instrumented Pantograph As Part of a Continuous Structural Health Monitoring System for Railway Overhead Lines[C]//EWSHM-7th European Workshop on Structural Health Monitoring. France: HAL CCSD, 2014.
����[9] KARAKOSE E, GENCOGLU M T, KARAKOSE M, et al. A New Experimental Approach Using Image Processing Based Tracking for an Efficient Fault Diagnosis in Pantograph-Catenary Systems[J]. IEEE Transactions on Industrial Informatics, 2016: 1-1.