�l(f��)���r�g�����ٷ��Ӌ��C�QՓ���g�[��1��
ժ Ҫ�� ժ Ҫ��ᘌ� �σ�ͯ���ҷ��]�������ϵK���O(sh��)Ӌ�������c�w���^�ߵ������F(xi��n)�����g(sh��)�� �σ�ͯ�������ϵ�y(t��ng)����� �σ�ͯ�Ļ����dȤ����(g��u)�������͑����c����(w��)���˵�ϵ�y(t��ng)���w�ܘ�(g��u)��ͨ�^�͑��˵Ĕz��C�˶��c��(sh��)��(j��)��ݔģ�K���ɼ��D���\��z��C��(n��i)�Ⅲ��(sh��)�����D���c�Ⅲ��(sh��)��(j��)��
����ժ Ҫ��ᘌ� �σ�ͯ���ҷ��]�������ϵK���O(sh��)Ӌ�������c�w���^�ߵ������F(xi��n)�����g(sh��)�� �σ�ͯ�������ϵ�y(t��ng)����� �σ�ͯ�Ļ����dȤ����(g��u)�������͑����c����(w��)���˵�ϵ�y(t��ng)���w�ܘ�(g��u)��ͨ�^�͑��˵Ĕz��C�˶��c��(sh��)��(j��)��ݔģ�K���ɼ��D���\��z��C��(n��i)�Ⅲ��(sh��)�����D���c�Ⅲ��(sh��)��(j��)�����(w��)���˂�ݔ;����(w��)���˵�̓���ں�ģ�K����(j��)�͑�������ݔ?sh��)ĈD���c�Ⅲ��(sh��)��(j��)����(g��u)�챳���N�D�����r���z��Cλ���c�Ƕȣ���Ɉ�����̓���ںϣ���ͨ�^�Ñ�����ģ�K��(n��i)���\�ӿ��Ʋ��֣����F(xi��n) �σ�ͯ����������Ƅ��c�D(zhu��n)�ӵ��\�ӵĿ��ơ����Y(ji��)��������ԓϵ�y(t��ng)��ͨ��ͬ�����c��(w��n)�����^�ߣ��Ɍ��F(xi��n)��������ߵĸ߾��ȿ��ƣ�ƽ�����ʿ��_��30.97 f/s����Ч���τӑB(t��i)����ʬF(xi��n)�������ԣ��ɞ���� �σ�ͯ�Ļ����dȤ���������]�ϵK�ṩ��Ч������
�����P(gu��n)�I�~���������;�����F(xi��n)��; �σ�ͯ;�����dȤ;�����N�D;̓���ں�;�\�ӿ���
����0 �� ��
���� �σ�ͯ���������ȱ�ݣ���������ڲ�ͬ�̶��ϵ������J֪�������㣬����׳��F(xi��n)��w���䡢���ּ����ҷ��]���Ը��c�����ϵ�ȱ�ݣ��L������������ �σ�ͯ�����H���������γ��ϵK[1] ���Z���c �������ȱ��������������Tͨ�^ҕ�X������������c�J֪���磬���ᘌ� �σ�ͯ���O(sh��)Ӌ��������߸���(y��ng)ע��ҕ�X�ě_���c�������w�[2] �����ڴ��O(sh��)Ӌ�� �σ�ͯ������ߣ����{(di��o)�� �σ�ͯ����w����ע�������е�ͬ������ߵĽ����У��������a(ch��n)����Ӵεĸ��X����(y��ng)������Ч���l(f��)�����ČW���dȤ�c���ܣ����� �σ�ͯ�����ҷ��]�������ϵK����������H��������[3⁃4] ���錍�F(xi��n)��Ŀ�ģ����O(sh��)Ӌһ�N�܉�?q��)��F(xi��n) �σ�ͯ�c������߽�����ϵ�y(t��ng)��
�������� Mindstorms �Ŀ���ϵ�y(t��ng)ͨ�^ UDP �f(xi��)�h��ɿ��ƙC�����c PC ��ͨ�ţ����\�� PD ���F(xi��n)���ƣ���ϵ�y(t��ng)�Ŀ��ƾ��ȸߣ�����ͨ��ͬ�����c����ʬF(xi��n)���������^��[5] ;���� WinCE �Ŀ���ϵ�y(t��ng)ͨ�^�h���{(di��o)ԇģʽ�c���������B�������ʾ������(n��i)�õ� WinCE����ϵ�y(t��ng)���C���˵Ŀ��ƣ�ԓϵ�y(t��ng)����ʬF(xi��n)���������cͨ��ͬ����(w��n)�����^�ѣ������ƾ����Բ�[6] �������F(xi��n)��(Augmented Reality�� AR)���g(sh��)����һ�N����Ӌ��Cҕ�X���g(sh��)���z��Cλ�úͽǶ��M�Ќ��r�\�㣬ͬ�r���挍�D���(n��i)�B��Ӌ��C�����ɵ����S̓�M���w����S�D��ļ��g(sh��)[7⁃8] �������H��̓�M�F(xi��n)�����g(sh��)�ă�(y��u)�c���Ժܺõ��^�У����ҏ��a��̓�M�F(xi��n)�����g(sh��)��ȱ��֮̎���c̓�M�F(xi��n)�����g(sh��)��ȣ���չʾЧ�������挍[9] ��
�����C�����Ϸ����������O(sh��)Ӌһ�N���� AR ���g(sh��)�� �σ�ͯ�������ϵ�y(t��ng)��ԓϵ�y(t��ng)����һ�N̓�M������߽���ϵ�y(t��ng)���Ɍ��F(xi��n)���挍������ߵ��\�Ӡ�r�c��헹��ܵľ�����ʾ��ͬ�r�ṩ�������ܡ�ԓϵ�y(t��ng)��ͨ�^̓�M������ߞ� �σ�ͯ�ṩ���ӽk���ijʬF(xi��n)Ч����ͬ�r�܉�����挍������ߵĹ��ܣ��������挍��ߟo���ṩ�Ę�Ȥ�������� �σ�ͯ�Ļ��������c�����J֪������
����1 ���� AR ���g(sh��)�� �σ�ͯ�������ϵ�y(t��ng)
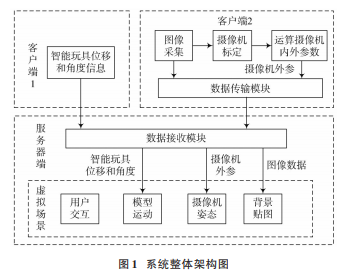
����1.1 ϵ�y(t��ng)���w�ܘ�(g��u)
����ͨ�^���� AR ���g(sh��)�� �σ�ͯ�������ϵ�y(t��ng)�����\�� C/S �ܘ�(g��u)��(chu��ng)�����o�͑����c����(w��)���˵�ϵ�y(t��ng)���w�ܘ�(g��u)�����У��͑��˵���Ҫ�΄�(w��)��ɼ��D�˶��z��C�Լ��\�������Ϣ��;����(w��)���˵��P(gu��n)�I؟���c��Ⱦ̓�M��������������\�ӿ��ơ�������̓���ںϼ��Ñ����������@ʾ�ȡ�ϵ�y(t��ng)�����w�ܘ�(g��u)��D 1��ʾ���D 1 ϵ�y(t��ng)���w�ܘ�(g��u)�D����(j��) AR ���g(sh��)�� �σ�ͯ�������ϵ�y(t��ng)�ĬF(xi��n)����(y��ng)��������ԓϵ�y(t��ng)�Ĺ��������������������c�������������У����������������ԓϵ�y(t��ng)�����\�еĸ��������Ø˶��z��C�ķ�ʽ���z��C�ˑB(t��i)�_�ʣ��_��������߈���̓���ںϵ�Ŀ��;��������������c�� �σ�ͯ�քӲٿ�̓�M������������cָ������·���Ƚ������ܡ�
����1.2 ϵ�y(t��ng)����ģ�K�����c�O(sh��)Ӌ
����1.2.1 �z��C�˶��c��(sh��)��(j��)��ݔģ�K
����ͨ�^�ɼ�һ���������������R�D�ĈD��ʩ�z��C�˶����\����z��C�ă�(n��i)������(sh��)���� XML ��ʽ���ļ������\���(n��i)������(sh��)��ͨ�^�xȡ���\��ă�(n��i)������(sh��)���Բɼ���ÿ���D�������(j��)�����z��C�ⲿ����(sh��)��ʩ�\�㣬�����(w��)���˰l(f��)���\�����õĔz��C�ⲿ����(sh��)�����ɼ��Į�ǰ���D��(sh��)��(j��)���^�m(x��)�M����һ�����؏������^�̌�ʩ��ѭ�h(hu��n)��ͨ�^ Socket���F(xi��n)��(sh��)��(j��)��ݔ������ͬ����(w��)���˵� TCP �B�Ӻְ��l(f��)��ÿ����(sh��)��(j��)���؏Ͳ���ֱ���M����ɻ�Kֹ���z��C�˶��c��(sh��)��(j��)��ݔģ�K�^����D2��ʾ��
����1.2.2 ����̓���ں�ģ�K
������ģ�K��Ҫ����̓�M������c����̓���ںσɲ��֡�ϵ�y(t��ng)���挍����������(j��)���̓�M�h(hu��n)���Ĵ�������̓�M������(n��i)��Ҫ����������������Sģ�͡�̓�M�z��C��ģ�Ͳ��|(zh��)��������Դ��̓�M����ȡ����⣬���Ԅ����ι��ܼ��뵽̓�M������߃�(n��i)���������̓�M�h(hu��n)����ʩ����չʾ��
�����͑��˂�ݔ?sh��)Ĕz��C�ⲿ����(sh��)��(sh��)��(j��)�c�D��(sh��)��(j��)�ɷ���(w��)���˵Ĕ�(sh��)��(j��)����ģ�K����;ͨ�^��ʽ׃�Q���յ��ĈD��(sh��)��(j��)������ʽ׃�Q��ĈD��(sh��)��(j��)������ǰ���ı����N�D;���ý��յ��Ĕz��C�ⲿ����(sh��)�\����z��C��λ�˺ͽǶȣ�����(j��)�\��Y(ji��)������ǰ���Ĕz��C�ˑB(t��i)��ʩ�O(sh��)��;�M����һ��ѭ�h(hu��n)��(zh��)�������^�̣����ں����挍������̓�M�����ĸй�Ч��չ�F(xi��n)�o �σ�ͯ������̓���ں��^����D 3��ʾ��
����1.2.3 �Ñ�����ģ�K
���������σɂ�ģ�K�Ļ��A(ch��)�ϣ��O(sh��)Ӌ������������\�ӿ��ơ�ָ���\��·���ɲ��ֵ��Ñ�����ģ�K�������õ� �������c�挍���ṩ�o �σ�ͯ[10] ���Ñ�����ģ�K�Y(ji��)��(g��u)��D 4��ʾ��
����ͨ�^�Ñ�����ģ�K�е��\�ӿ��Ʋ��֣� �σ�ͯ�Ɍ��F(xi��n)���I�P����˻�����ݔ���O(sh��)�������������D(zhu��n)�Ӻ��Ƅ�;ͨ�^ԓģ�K�е�ָ���\��·�����ֿɌ��F(xi��n)��Ļ��ʰȡ���ܣ����� �σ�ͯͨ�^���ָ��̓�M�h(hu��n)���е�ij���c��ϵ�y(t��ng)�܉�z�y��ԓָ���c��λ�ã����������������(j��)�z�y����ָ���cλ���\��[11⁃12] ��
����1.4 ����̓���ں�
����ͨ�^�O(sh��)�ñ����N�D�������z��Cλ�úͽǶ����Ԍ��r���£��܉���̓�M�������挍�����ӽ�һ�£����F(xi��n)������̓���ں�[13] ��
����1.4.1 �����N�D��(g��u)��
�����ں�̓�M�������挍������ AR ���g(sh��)���P(gu��n)�I���Դˌ��F(xi��n)��̓�M���w��D����?q��)��H�h(hu��n)����(n��i)�挍�B�ӵ�Ч��[14] ���ʑ�(y��ng)���ɔz��C�ɼ��ĈD����̓�M�����ı����N�D��ͨ�^�\���o���z��C�������Ⱦ�ӴΣ��ڈ�����(n��i)��(g��u)�챳���N�D�������ֵ������(j��)�ɸߵ��͌����w��ʩ��Ⱦ����������̓�M������(n��i)����Ⱦ����O(sh��)�����N�D�����ֵ��-1����������Ԫ�ص����ֵ���� 1�����������z��C�IJɼ��^(q��)�g�O(sh��)�����ֵ≥1���o���z��C�IJɼ��^(q��)�g�O(sh��)�����ֵ≤-1���������̓�M������(n��i)���˱����N�D֮�����������Ԫ�ؾ������z��C��ʩ�����o���z��C�H�������N�D��ʩ������ÿ���D��ʩ��Ⱦ�r����(y��ng)�Ȍ�����̓�M������(n��i)���ֵ�ߵIJ���ʩ��Ⱦ���ٌ����ֵ�͵ı����N�D��ʩ��Ⱦ���@�ñ����N�D��������̓�M����֮�����KЧ����
����1.4.2 ��(sh��)��(j��)�����c��������
������ɱ����N�D��(g��u)����ڈ�����ÿ����ʩ��Ⱦ��ͨ�^�O(ji��n) �˿ڽ��յĈD��(sh��)��(j��)�������N�D��ʩ���£�ͬ�r��̓�M�z��C��λ���c�Ƕ����Ԍ��r�{(di��o)��[15] �����������^����D 5 ��ʾ������ New Thread ��(g��u)���Ӿ��̣����Ӿ��̃�(n��i)�_���O(ji��n) �˿ڌ�ʩ�O(ji��n) �����Ӿ��̱O(ji��n) �˿ڽ��յ��D��(sh��)��(j��)���䌍ʩ����(y��ng)�������D(zhu��n)�Q;ͨ�^ GPU ���������O(sh��)������λ�����ص���ͨ��ֵ�������ˆ��O(sh��)�ø�������ֵ�\��Ч�ʵ͵Ć��};�� Color ��(sh��)�M��(n��i)�惦ÿ���D���ȫ������ֵ���ٌ���ǰ���ı����N�D����ֵ��ʩ�O(sh��)�á�
����1.5 ��������\�ӿ���
�����錍�F(xi��n)��������ߵ��\�ӿ��ƣ���ͨ�^�͑�/����(w��)��ģʽ������ TCP/IP �f(xi��)�h�O(sh��)Ӌ����ʽ�������Ʒ��������У��͑����c����(w��)���˷քe����λ�C�c��λ�C�����w�����^����D 6��ʾ��
�������w���Ʋ��E�飺
����1)����λ�C�l(f��)���B��Ո��
����2)��λ�C����λ�C�l(f��)�����B��Ո��ʩ�O(ji��n) ��
����3)����λ�C�O(ji��n) ��������λ�C�l(f��)�����B��Ո�����δ�o�葪(y��ng)�𣬄t���ز��E 1);����λ�C�õ���λ�C���B�ӑ�(y��ng)�𣬄t�^�m(x��)��
����4)�� λ �C �� �� �� �� �� �� �� �� λ �� ��(sh��) ��(j��) { E, A1 , A2 ,…, A5 }�M���xȡ������ A1~A5 ��ʾ������ߵ� 5 �����D(zhu��n)���ɶȣ�E ��ʾ������ߵ����wƽ�����ɶȣ����Ԕ�(sh��)��(j��)����ʽ������b֮������λ�C�l(f��)�͡�
����5)����λ�C��������λ�C�Ĕ�(sh��)��(j��)�����յ�֮�����O(sh��)�����\��܉�E������(j��)������������\�����ɶ���һ����λ������{ ΔE,ΔA1 ,ΔA2 ,…,ΔA5 }��ʩ�\�㣬����ָ���ʽ������b�l(f��)����λ�C��
����6)��λ�C���յ�������λ�C��ָ�(sh��)��(j��)֮��������߸����ɶȵ�λ��������(sh��)��(j��)��ȡ����������(j��)�O(sh��)���������(q��)����������\�ӡ�
�������P(gu��n)֪�R���]��Փ�İl(f��)����H�ڿ����
����7)��λ�C��ͨ���Ƿ���_��ʩ�z�y����δ���_�t�D(zhu��n)�����E 4);��֮���t�D(zhu��n)�����E 1)��
����2 ���Y(ji��)������
������ij��˾���a(ch��n)��������ߞ錍��(��D 7 ��ʾ)���z��ϵ�y(t��ng)�ľC�����ܡ��xȡ���� Mindstorms �����ܙC���˿���ϵ�y(t��ng)�c���� WinCE ���_��ʽ 6R ���I(y��)�C���˿���ϵ�y(t��ng)���鱾��ϵ�y(t��ng)�Č���ϵ�y(t��ng)���ɂ�����ϵ�y(t��ng)�քe�酢���īI[5⁃6]ϵ�y(t��ng)�������������߷քe��������ϵ�y(t��ng)�У����ȷ�����ϵ�y(t��ng)�ľC�����ܡ�ϵ�y(t��ng)�yԇ�h(hu��n)���飺
����1)����(w��)���ˣ�Microsoft SQL Server 2014 ��(sh��)��(j��)�졢 Windows Server 2016 �� ��(w��) �� �� �� ϵ �y(t��ng) ��Power Builder 9.1�� IIS 6.1��Ϣ����(w��)�������ߡ�
����2)�͑��ˣ�Windows 10��Power Builder 9.1��IE10 �����ϰ汾�g�[����
����2.1 ͨ��ͬ���Է���
���������ڽ����^���Ќ�ʩ�����������ߵ��\�ӿ��ƕr����λ�C�c��λ�C��ͨ��ͬ�����Ȟ���Ҫ��ͬ����Խ�߄t������ߌ������^���е��\�ӿ��Ʒ�ӳԽ�`��������܉���Ч���� �σ�ͯ�����r���挍�w�ڴ�ͨ�^ͨ���l�ʌ�����ϵ�y(t��ng)��ͨ��ͬ���Ԍ�ʩ�z�y�c���������Ùz�y�Y(ji��)����D 8��ʾ��ͨ�^�D 8�܉�ó�������ϵ�y(t��ng)�c WinCE ϵ�y(t��ng)�Sͨ�����ڵ����ӣ�ͨ���l�ʲ�δ���F(xi��n)�@�����ӣ��� Mindstorms ϵ�y(t��ng)��ͨ���l�ʲ��ӬF(xi��n)���^�����@;����ϵ�y(t��ng)�����wͨ���l�����@���������ɂ�ϵ�y(t��ng)���ɴ˿�Ҋ������ϵ�y(t��ng)�c WinCE ϵ�y(t��ng)��ͨ��ͬ����(w��n)���Ը��ã�����ϵ�y(t��ng)��ͨ��ͬ���Ը��ߡ�
����2.2 �\�ӿ������ܷ���
�����քe������ϵ�y(t��ng)�����õĔz��C���ΰ��b�ڌ����������ϣ����ȸ�ϵ�y(t��ng)�����^���п��ƌ��������ߕr���\�ӿ����`��y(t��ng)Ӌ��ϵ�y(t��ng)�\�ӿ����^���У����������ߵČ��H܉�E���O(sh��)Ӌ܉�E�g���`��Դˌ��ȸ�ϵ�y(t��ng)���\�ӿ����`��քe���� x��y��z����ƽ�Ʒ�����`����ȽY(ji��)����D 9��ʾ���ɈD 9��֪���ڱ���ϵ�y(t��ng)�����£����������ߵ� x��y��z ���������ƽ��λ���`�����Ξ� 1.96 mm��0.69 mm��0.75mm���������������`�����Ξ� 2.41mm��0.98 mm��1.12 mm;�� Mindstorms ϵ�y(t��ng)�����£����������ߵ� x��y��z ���������ƽ��λ���`�����Ξ� 3.08 mm��1.76 mm��1.68 mm���������������`�����Ξ� 3.86 mm��2.12 mm��2.47 mm;�� WinCE ϵ�y(t��ng)�����£����������ߵ� x��y��z ���������ƽ��λ���`�����Ξ� 5.47 mm��2.78 mm��2.71 mm���������������`�����Ξ� 6.23 mm��3.66 mm��3.56 mm���ɴ��f��������ϵ�y(t��ng)�����������ߵ��\�ӿ����`����ͣ��܉���õ،��F(xi��n)������ߵČ��H�\��܉�E�c�O(sh��)Ӌ�\��܉�E�غϣ�����Ч���á����ʶȸߡ��������܃�(y��u)Խ��
����2.3 �������ܜyԇ
�������Mһ���z��ϵ�y(t��ng)���ӑB(t��i)����ʬF(xi��n)���������ܣ��F(xi��n)������ϵ�y(t��ng) 30 s��(n��i)�����N�D���µĎ��ʠ�r��ʩ�����D 10�и�ϵ�y(t��ng)�Ĝyԇ�Y(ji��)���܉�ó����ڌ�ʩ�����N�D�����^���У�����ϵ�y(t��ng)�c WinCE ϵ�y(t��ng)��ƽ���� �ʷքe��30.97 f/s��25.55 f/s�����@����Mindstormsϵ�y(t��ng) 15.33 f/s ��ƽ�����ʣ���Ҋ����ϵ�y(t��ng)�c WinCE ϵ�y(t��ng)���ڄ� �B(t��i) �� �� �� �� �� �@ ʾ �� �� �o �� �� �� Ч �� �� �� ���� Mindstorms ϵ�y(t��ng)�ڳʬF(xi��n)�ӑB(t��i)����������Է������@������
�����C������ 3 �M���yԇ�Y(ji��)����֪������ϵ�y(t��ng)��ͨ��ͬ���ԡ��\�ӿ������ܼ���������������ľC�ϱ��F(xi��n)���郞(y��u)Խ�����зdz��õČ��r�������ܣ��܉���Ч���� �σ�ͯ�c������ߵĻ����w�кͻ����ԡ�
����3 �Y(ji��) �Z
���������O(sh��)Ӌ��һ�N���� AR ���g(sh��)�� �σ�ͯ�������ϵ�y(t��ng)��ᘌ� �σ�ͯ�ڻ����c���H�����ȷ����ȱ�ݣ��ṩһ�N�Ɍ��F(xi��n) �σ�ͯ�c��������g���r������ϵ�y(t��ng)��ͨ�^ AR ���g(sh��)��̓���ںϣ����F(xi��n)���挍�h(hu��n)���ЯB��̓�M���w��D���Ŀ�ģ��� �σ�ͯ�ṩһ�������̓�M�������������Y(ji��)���\�ӿ��Ʒ������F(xi��n) �σ�ͯ��������ߵ��\�ӿ��ƣ���������Ч������ �σ�ͯ�ڽ����^���м��l(f��)��������ߵ��dȤ�����������ҷ��]�c���ֵ���w�������� �σ�ͯ�Ļ��������c���H����������ͨ�^���yԇ��֪������ϵ�y(t��ng)�����^�ߵ�ͨ��ͬ�����ܣ�ͨ�ŷ�(w��n)�����^�ã��܉�?q��)��F(xi��n)��������ߵ���Ч���ƣ����ƾ��ȸߣ�ͬ�r����Ч�������ʬF(xi��n)�ӑB(t��i)����������ԣ����� �σ�ͯ���挍�w�С�——Փ�����ߣ�����䣬ë����
������ �� �� �I
����[1] ���������Y�ԣ��w���գ��� .���ھ����J֪�ă�ͯ������߽����O(sh��)Ӌ�о�[J].���b���̣�2019��40(16)��165⁃170.
����[2] �w���� . �@���Ļ�ҕ���� �σ�ͯ���������F(xi��n)��Č�ҕ�cͻ��[J].�Ĵ���2019(7)��161⁃164.
����[3] ����m�����㣬Ф�ٱ� . ������ �σ�ͯ��Ϣ�ӹ��ٶ��c��(sh��)���ӹ��g���н�����[J]. ���A�О��t(y��)�W�c�X�ƌW�s־��2019��28 (10)��925⁃929.
����[4] ��÷÷�����x�����f�ڣ��� .��ͬҕ ��ʾ��ʽ���W�gǰ �σ�ͯɤ�����l��Ӱ�[J]. ���W�����Z�����s־��2018��26(6)�� 624⁃627.
����[5] ���������Ա�����ڣ��� .���� Mindstorms �����ܙC���˿���ϵ�y(t��ng)�_�l(f��)[J]. ��h������W�W��(��ͨ�ƌW�c���̰�)��2018�� 42(2)��247⁃252.
����[6] �����A���S���ȣ��mѩ�G .���� WinCE ���_��ʽ 6R ���I(y��)�C���˿���ϵ�y(t��ng)�о��c�_�l(f��)[J]. �M�ϙC���c�Ԅӻ��ӹ����g(sh��)��2018 (6)��76⁃80.
����[7] ����ɭ������x������Ҋ���� .���� AR ���g(sh��)�Ŀ�ƽ�_�ƄӽK�˵��o���W��ϵ�y(t��ng)[J].�D�W�W��2018��39(1)��85⁃90.
����[8] ���i��������ʯ��܊���� .���������F(xi��n)�����g(sh��)�Ĺ��̈D�W�ƄӶ˽̌Wϵ�y(t��ng)�O(sh��)Ӌ�c�_�l(f��)[J].�D�W�W��2018��39(6)��1207⁃1213.
����[9] �������f���� . ���������F(xi��n)���Įa(ch��n)Ʒչʾ APP �O(sh��)Ӌ�о�[J]. ���b���̣�2017��38(14)��219⁃223.
����[10] ��Ⱥ�룬�����壬���o�A���� .���� VR/AR ���g(sh��)�ęCе�n�̽̌W����̽��[J].�Cе�O(sh��)Ӌ��2018��35(z2)��432⁃434.
����[11] ���ӽ������� . ���������F(xi��n)�����g(sh��)�ă�ͯ��(sh��)�ֻ���x�a(ch��n)Ʒ�O(sh��)Ӌ[J].���b���̣�2019��40(8)��197⁃203.
����[12] ��Ԫ���܃磬�ĵ����� . �����Ƅ������F(xi��n)���ČW�gǰ��ͯ�����Α��о��c�O(sh��)Ӌ[J].늻������о���2019��40(4)��68⁃75.
����[13] ���ķ������Ұl(f��) . �ƌW����ҕ���������F(xi��n)�����g(sh��)�̌W��(y��ng)�õ��о��cչ��[J].늻������о���2018��39(7)��64⁃69.
����[14] ��Ҳ���������� .������ȈD��ָ��c���w��ۙ�������F(xi��n)��ϵ�y(t��ng)[J].ϵ�y(t��ng)����W��2017��29(11)��2788⁃2795.
����[15] ��־�������������£��� .���ں����P(gu��n)�V�����o���R AR ��Ŀ�˸�ۙ����[J].ϵ�y(t��ng)����W��2018��30(11)��4462⁃4468.