�l(f��)���r(sh��)�g�����ٷ��Ӌ(j��)��C(j��)�QՓ���g�[��1��
ժ Ҫ�� ժҪ��m,_lk�C(j��)������20���o(j��)60�������(w��n)���ԁ�(l��i)�����о����_�l(f��)����(y��ng)��һֱ�ܵ���I(y��)�c�ƌW(xu��)�ҵ��P(gu��n)ע���V����(y��ng)���ڻ����ɮa(ch��n)���O(sh��)�䰲�b����·ʩ�����C(j��)е���졢菎r�ɵV���T���I(l��ng)���S��.x-,_lk�C(j��)���˵İl(f��)չ��Խ��(l��i)Խ��ҕ��ҕ�Xϵ�y(t��ng)��(y��ng)�õ����I(y��)�C(j��)�����ϡ�������Ҫ�M(j��n)�ЈD��̎�����
����ժҪ��m,_lk�C(j��)������20���o(j��)60�������(w��n)���ԁ�(l��i)�����о����_�l(f��)����(y��ng)��һֱ�ܵ���I(y��)�c�ƌW(xu��)�ҵ��P(gu��n)ע���V����(y��ng)���ڻ����ɮa(ch��n)���O(sh��)�䰲�b����·ʩ�����C(j��)е���졢菎r�ɵV���T���I(l��ng)���S��.x-,_lk�C(j��)���˵İl(f��)չ��Խ��(l��i)Խ��ҕ��ҕ�Xϵ�y(t��ng)��(y��ng)�õ����I(y��)�C(j��)�����ϡ�������Ҫ�M(j��n)�ЈD��̎����ᘌ�(du��)��ֵ���ָĿ�����ں��m(x��)��ù����|(zh��)���c�Ƕȡ���(sh��)�(y��n)�����c����ɫ�Ć�(w��n)�}�����M(j��n)����ͨ�}ֵ��ֵ��̎���õ��ĽY(ji��)�����˲����ǺܝM�⣬���ԽY(ji��)�Ͼ��w��r����(du��)�㷨�M(j��n)�Ѓ�(y��u)�������û���6ɫ�{(di��o)�ĺڰ�̎������������������Ķ�λ�����������[�ŽǶȡ�
�����P(gu��n)�I�~�����I(y��)�C(j��)����;�C(j��)��ҕ�X;�D��̎��
��������(sh��)�(y��n)�C(j��)������Ҫץȡ�Ĺ�����ƷLogoģ�ߺ����I(y��)�h(hu��n)����D1��ʾ����ߴ���L(zh��ng)26em����18cm���� 8em����ʹ�õęC(j��)������̖(h��o)��JLRB020��
�������I(y��)�h(hu��n)����D1��ʾ��̎���҃�(n��i)���_(t��i)�ϣ����ϵĺ�ɫʮ�֘�(bi��o)ӛ����У���Ϸ��z���^���h(yu��n)���c�Aб�Ƕȣ�����Ҫһ�c(di��n)�������c�����_(t��i)��ɫ�{(di��o)��e�M���ܴ���˱����I(y��)�x����Gɫ����幩�����[�š����n�}���ڏV�|ijģ�߹�˾ʾ�̙C(j��)�������a(ch��n)���ı����¢裬����ه��Ҏ(gu��)��������ˮ��������\(y��n)�����谴ָ����Ҫ���cλ���M(j��n)�й����Ĕ[�ţ��@�N�̻���ץȡ���̶��Dz���ʾ�̈�(zh��)�У�ͨ���ԡ��`���Ժܲ��ˣ������΄�(w��)���о�Ŀ��(bi��o)��������(du��)�����[�ŵ�Ҫ��ץȡ�ęC(j��)���˕�(hu��)���m��(y��ng)�Ăɜy(c��)Ŀ��(bi��o)������λ�ã�����׃�C(j��)еץץȡ�ĽǶ��M(j��n)�й���ץȡ��
����1��(sh��)�F(xi��n)ԭ�����E
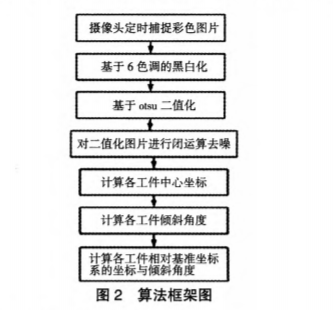
���������΄�(w��)�Č�(sh��)�F(xi��n)߉���£����Ȼ����ֵ�ָ��(l��i)��ȡĿ��(bi��o)�����ڈD���е�λ�ã��ڲ�ɫ�z���^�Ĕz�õ��DƬ���Ȍ���ɫ�D�D(zhu��n)�Q��ڰDƬ���M(j��n)�ж�ֵ���ָ�鷽����m(x��)Ӌ(j��)�㹤����������(bi��o)�ͽǶȵȹ����������ڱ����в�ɫ�D���ڱ��㷨���ڲ�����Ҫ��
����1.1����6�Nɫ�{(di��o)�ĺڰ�
������ɫ�D���D(zhu��n)�ɺڰķ���Ҳ�Ƕ�N���ӣ��ڴˇLԇ��һЩ�����㷨��Ȼ����ɫ�D��Ķ�ֵ��̎��һ�����M(j��n)�лҶ�̎����
�����Ҷ�̎��һ�㳣�õ������N�㷨�����ֵ����ƽ��ֵ�����ә�(qu��n)ƽ��ֵ������ʽ�cЧ�����£�
����(1)���ֵ�����µ��ɫֵ��=G��=max(R��G��B)��ͨ�^(gu��)�@�N����̎���õ��ĈDƬ���ȿ�����(l��i)�dz���
����(2)ƽ��ֵ�����µ��ɫֵ��=G��=(R+G��)/3������ƽ��ֵ��̎���õ��ĈDƬ�@�÷dz���͡�
����(3)�ә�(qu��n)ƽ��ֵ�����µ��ɫֵR=G=B= (R�g(sh��)��r+G��I��Wg+B*Wb)���҂�֪����ͬ��Ⱥ��(du��)�ɫ�����г̶��Dz�һ�ӵģ�������N�ɫֵ�ę�(qu��n)��Ҳ��һ�ӣ�ͨ����(l��i)�v�Gɫ�^�ߣ��tɫ��Σ��{(l��n)ɫ��ͣ����^����ȡֵ��Wr=30%��Wg=59%��Wb=l 1%��
����ԓ�ڰ��㷨��ݔ��?y��n)��?sh��)�鹤���_(t��i)�Ϸ��z���^���@�ĈD����(du��)�D������ң����ϵ����M(j��n)�б�v����(du��)ÿ��(g��)�����c(di��n)��RGB����(g��)�����M(j��n)���������ҳ���Сֵ����������RGB��С������tɫ���ж�����(d��ng)ǰɫ�{(di��o)��(qu��n)�؞��{(l��n)�c�G�Ļ��ɫ������ɫ��ͬ�r(sh��)�����ɫ�{(di��o)ƥ���ϙ�(qu��n)�أ������ƣ�������ù�ʽ(1)Ӌ(j��)��Ҷ�ֵ���؏�(f��)���ϲ���ֱ����v��D���������ء�
�����ĈD3�͈D4���Կ������;Gɫ��(qu��n)�غڰ��õ���Ч�����@��(y��u)����ͨ�ڰ�̎����
����Ŀǰ���ֵ�_�������кܶ࣬�����^����Ҳ��Ч���^�õķ�����Otsu�����g�����㷨����ˣ������xȡOtsu��ֵ���㷨��(l��i)�_��ȫ���ֵ��
�������У�p(x��y)��A(x��y)̎������ֵ������r��ֵ�����O(sh��)�Þ�255��С��r��ֵ�����O(sh��)�Þ�O��ͨ�^(gu��)otsu �������õ��D6��Ч�������⣬�ڶ�ֵ��֮�M���M(j��n)���]�\(y��n)���ȥ�����c(di��n)���㷨����Ͷ�뵽���m(x��)���R(sh��)�e�����С�
����1.3��ȡ��������������(bi��o)�͔[�ŽǶ�
�����ګ@�ÈD6��ʹ���ΑB(t��i)�W(xu��)�е��]�\(y��n)��ȥ��ë���c�����ĸɔ_���c(di��n)���ɫ@�ù�����(zh��n)�_��݆�����ګ@�����݆���D�Ɍ��DƬͶ�뵽���h(hu��n)��(ji��)������ȡ�����|(zh��)���c�Aб�Ƕȡ�
������(du��)�ڲ�������������(bi��o)�ķ������ڴ˱��Ļ��ڈD���ֵ�������M(j��n)������Bͨ���������㷨���������Bͨ��֮���������Bͨ����e������ĕr(sh��)���҂����O(sh��)��һ��(g��)�ֵ����(du��)�a(ch��n)�������c(di��n)ȥ���������@��(g��)�ֵ���O(sh��)��Ҫ��ʮ���ɣ��ڴ˲�٘����������o���б��еIJ�ͬ�Bͨ���x�費ͬ�ɫ�Ę�(bi��o)ӛ�������Ѳ�ͬ�ɫ�崺�ڲ�ͬ�ɫ�ĈD�������У����һ��(l��i)�Ɍ���ͬ�����^(q��)�e�_��(l��i)���o���m(x��)Ӌ(j��)���|(zh��)�Ď���(l��i)������Ч����D7��ʾ��
�����ɹ�ʽ�ɿ������҂�ֻ��Ҫ���ù�ʽ(4)����� Mm��%����‰���ɴ��˵���ʽ(6)�У���������|(zh��)�ġ��؏�(f��)���㷨����(du��)�ָ��_��(l��i)�ĈD���M(j��n)����⣬���ɵõ���ͬ�������|(zh��)������(bi��o)��������(bi��o)�c��ɫ��(bi��o)ӛ�c(di��n)���ɞ��Ϸ��C(j��)еץ���Ƅ�(d��ng)�����c���x��
�����C(j��)ץ��ץȡ�����r(sh��)����Ҫ���D(zhu��n)��צ��ʹ�����_���o�����ăɂ�(c��)�������ҪӋ(j��)�㹤���Ĕ[�ŽǶȣ�����(sh��)�(y��n)ʹ�û���׃�Q��ȡ�����ĵ���ֱ�����̡�
����ԓ�㷨��(sh��)�|(zh��)���ҳ��D�������НM��ijY=m3c+c ֱ���������c(di��n)����K���m�cc�����Ȍ�(du��)ֱ�������M(j��n)������(bi��o)ϵ׃�Q��׃��c=��m+Y����׃�Q����(bi��o)ϵ��ԭ��(l��i)ֱ������(bi��o)ϵ���c(di��n)��׃��ֱ���������@Щ�c(di��n)������Y=mx+c�ķ��̣��t�ژO����(bi��o)ϵ�У�ԓ��c(di��n)��������ֱ�������ཻ���c(di��n)(m��c)���㷨����KĿ��(bi��o)���ҳ�ԓ�ֱ�����ཻ���c(di��n)����D8����׃�Qԭ��D��
�������P(gu��n)Փ��߀���Բ鿴�����ڙC(j��)��ҕ�X�ı���ȱ�ݙz�y(c��)�о��C��
����2�Y(ji��)���Z(y��)
��������(sh��)�(y��n)��(du��)���I(y��)�C(j��)��������ҕ�Xϵ�y(t��ng)��������(du��)�����M(j��n)�ЈD��̎���Ͷ�λ�����]�������c����ɫ������[�ŽǶȆ�(w��n)�}���քe����6�Nɫ�{(di��o)�ڰ������� otsu��ֵ��������(du��)�D��̎������(sh��)�(y��n)�Y(ji��)��������̎���õ��ĈDƬ���Ʒdz���λ����(zh��n)��——Փ�����ߣ����ܳ�1���_�Ʊ�2
���������īI(xi��n)��
����[1]����.����ģ���ИI(y��)�ęC(j��)���������ԪͨӍ�C(j��)���c����ϵ�y(t��ng)�о�[D��.�V�ݣ��V�|���I(y��)��W(xu��)��201 1.
����[2�����x.���ؘ�(g��u)�C(j��)���������Ԫ����ϵ�y(t��ng)�O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n)[D��_�V�ݣ��V�|���I(y��)��W(xu��)��2013.