�l(f��)���r�g�����ٷ�����̎��QՓ���g�[��1��
ժ Ҫ�� ժҪ�����˽����ˌ�ȫ�Ԅ��{�܇�v�Ľ��ܶȣ��_��Ӱ푽��ܶȵ��P(gu��n)�I���أ��������ˌ�ȫ�Ԅ��{�g(sh��)���P(gu��n)ע�c�����ȣ�������(y��u)�����܇�v���g(sh��)����ģ��(Car Technology Acceptance Model, CTAM)�����ڴ�ģ�ͺͬF(xi��n)���{(di��o)���^�y���������О��O(sh��)Ӌ�{(di��o)�醖�����Ă��w���ԡ������О��
����ժҪ�����˽����ˌ�ȫ�Ԅ��{�܇�v�Ľ��ܶȣ��_��Ӱ푽��ܶȵ��P(gu��n)�I���أ��������ˌ�ȫ�Ԅ��{�g(sh��)���P(gu��n)ע�c�����ȣ�������(y��u)�����܇�v���g(sh��)����ģ��(Car Technology Acceptance Model, CTAM)�����ڴ�ģ�ͺͬF(xi��n)���{(di��o)���^�y���������О��O(sh��)Ӌ�{(di��o)�醖�����Ă��w���ԡ������О�����ˌ��Ԅ��{�܇�v���g(sh��)���ܶ�3���挦����չ�_�S�C(j��)�{(di��o)�顣Ȼ��������Logitģ�ͣ��\(y��n)�Æ��픵(sh��)��(j��)��(bi��o)��ģ�ͅ���(sh��)���Y�x�����ˌ�ȫ�Ԅ��{�܇�v���ܶȵ��P(gu��n)�IӰ����ء��Y(ji��)�����������ˌ�ȫ�Ԅ��{�܇�v�Ľ��ܶ��c��ס�^(q��)�����дΔ�(sh��)���^ʧ�О顢�����ԡ��B(t��i)�ȼ��������P(gu��n)����܇�v���g(sh��)����ģ���еĸ�֪�����Ժ�֪������׃������Խ�ã����ˌ�ȫ�Ԅ��{�܇�v���ܶ�Խ�ߡ�
�����P(gu��n)�I�~��ȫ�Ԅ��{�܇�v;���ܶ�;�����{(di��o)��;CTAMģ��;����Logitģ��
����0 ����
�����Ԅ��{���δ����ͨ���߰l(f��)չ����Ҫ�������nj��˹��{���a(b��)��������ּ��������ͨ��ȫ��Ч�ʡ���(d��ng)ǰ������(n��i)����܇�����̺Ϳ��ЙC(j��)��(g��u)�����ڼ��g(sh��)�ϲ�����(chu��ng)�º̓�(y��u)�����e�OͶ�����Ԅ��{��I(l��ng)��[1] ��Ȼ����Ŀǰ�Ñ�ȫ�Ԅ��{�܇�v�Ľ��ܶȲ������ʡ��v�^�������о������{�T��˿ͽǶ�չ�_��“�˙C(j��)���{�A��”�Ԅ��{����P(gu��n)�о��^��[2-6] ����ᘌ����ˌ��Ԅ��{�܇�v���ܶȵ��о��ɹ��t�����^�١����ϣ��҇����е�·��ͨ�h(hu��n)����(f��)�s����܇���Ќ��Ԅ��{�܇�v��ȫ������˸��ߵ�Ҫ��չ�_���ˌ�ȫ�Ԅ��{�܇�v�Ľ��ܶ��о����б�Ҫ��
����Ŀǰ�������˽Ƕȳ��l(f��)�������о��������Ԅ��{�܇�v�����˵��R�e����܇������Combs ����[7] ��(chu��ng)�����m���Ԅ��{�Ă������������M(j��n)�Йz�y���^��̶Ƚ�����܇�v�c������ײ�ĸ��ʡ� Woodman ����[8] ��̓�M�h(hu��n)�����о��Ԅ��{�܇�v�g�����^���g϶������r��Gupta����[9] ������Ԅ��{�܇�v�c���˅f(xi��)��Մ��ģ�ͣ�ԓģ������Ч���⽻��ړ����}���p��܇�v�����˵ĵȴ��r�g���������о����漰�����О�������^�١� Deb����[10] ��482�����L��չ�_�����ˌ��Ԅ��{�܇�v���ܶȆ����{(di��o)�飬�l(f��)�F(xi��n)��ȡ���ؽ�ͨҎ(gu��)�t�ȷe�O�О�������J(r��n)���Ԅ��{�܇�v������ϵ�y(t��ng)���w�Ľ�ͨ��ȫ���`Ҏ(gu��)�^������˕��������ŵ��^�֡�����(n��i)�����^���в�ͬ�����ԣ���ᓵ���[11] �{(di��o)��l(f��)�F(xi��n)�������^���`Ҏ(gu��)�О���Џı�������������[12] �������^���аl(f��)�F(xi��n)�^�����˵ȼt�����^�֕rϲ�g���֙C(j��)��������ע�⽻ͨ�h(hu��n)�����@������ȫ�Ԅ��{�܇�vҪ�ڇ���(n��i)�ռ������������О��J(r��n)֪Ҫ����ߡ�ͬ�r�����ˌ��Ԅ��{�܇�v�Ľ��ܶ�Ҳ����Ҫ��Xu����[13] ���ü��g(sh��)����ģ�͌�����(n��i)��W(xu��)���M(j��n)���{(di��o)�飬�l(f��)�F(xi��n)��֪�����ԡ���ه����֪��ȫ���Ԅ��{�܇�v���ܶ���ֱ��Ӱ푡� Zhang ����[14] ͨ�^���g(sh��)����ģ�Ͱl(f��)�F(xi��n)���κ�֪�����ԛQ�����L�ߌ��Ԅ��{�܇�v��ʹ����Ը����Ŀǰ�]�Ќ������О�����ˌ��Ԅ��{�g(sh��)���ܶ���Y(ji��)�ϵ��о���
������ˣ����о����چ����{(di��o)�飬��ֽY(ji��)�������О飬�����ˌ�ȫ�Ԅ��{�܇�v�Ľ��ܶ��M(j��n)�н�ģ������̽�����˵��P(gu��n)ע�c�����ڞ�ȫ�Ԅ��{�g(sh��)���M(j��n)�ṩ��Փ֧�֣���ȫ�Ԅ��{�܇�v���O(sh��)Ӌ�c���a(ch��n)�ṩ������
����1 ��(y��u)����܇�v���ܶ�ģ��
����1.1 CTAMģ��
����Davis[15] �� �� �� �� �� �� (Theory of Reasoned Action, TRA) ģ���A(y��)�y�О�B(t��i)�Ⱥ�����B(t��i)�ȃɴ����،����g(sh��)�����О���D��Ӱ푣�������˼��g(sh��)����ģ�� (Technology Acceptance Model, TAM)�� TAM�^��ע�ڼ��g(sh��)�Ľ��ܶȣ���Ajzen[16] �����Ӌ���О���Փ (Theory of Planned Behavior, TPB)��ԓ��Փ�����О���D���A(y��)�y���H�О顣�S�� Venkatesh����[17] ��(chu��ng)���˼��g(sh��)���ܺ�ʹ�ýy(t��ng)һģ��(Unified Theory of Acceptance and Use of Technolo⁃gy, UTAU)��ԓģ���M(j��n)һ�����������g���Ԅe����(j��ng)����Ը�Ԍ�����ʹ�õ�Ӱ푡�Osswald����[18] �����܇�v���g(sh��)����ģ�� (Car Technology Accep⁃ tance Model, CTAM)�����ں����Ñ��ĸ�֪�����ԡ���֪�����ԡ�ʹ����Ը�����Hʹ���О���ⲿ׃�����،���Ϣ���g(sh��)���ܺ�ʹ�õ�Ӱ푡�
����1.2 ��(y��u)����CTAMģ��
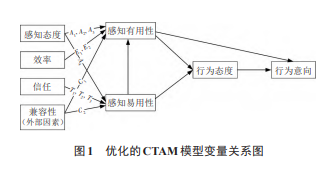
�������Č�܇�v���g(sh��)����ģ�� (CTAM) �M(j��n)�Ѓ�(y��u)��������֪�����Ժ�֪�����Լ�(x��)�����֪�B(t��i)�ȡ����Ρ�Ч���@ 3 ���S�ȣ������ⲿ���ؼ����ԡ��O(sh��)Ӌ��֪�B(t��i)�ȡ�Ч�ʡ����κͼ��������P(gu��n)���}���Y�x����K�_����(y��u)����CTAMģ����Ҫ׃����
�������ˌ�ȫ�Ԅ��{�܇�v���О�B(t��i)���ܸ�֪�����Ժ�֪�����Ե�Ӱ푡����и�֪����������֪�B(t��i)��A1 ,A2��A3��Ч��E 1,E2�ͼ�����C 1����֪����������֪�B(t��i)�� A4������ T 1,T2, T3��������C 2�������Ԟ��ⲿ׃����Ŀǰ�҇�ȫ�Ԅ��{�܇�v߀δ�������F(xi��n)����ʹ����Ը�H���������Ƿ�����Ԅ��{�܇�v���o���Hʹ���О顣��(y��u)���� CTAMģ��׃���P(gu��n)ϵ��D1��ʾ��׃���M�����1 ��ʾ��
����2 �����O(sh��)Ӌ������
����2.1 ���������О��c��(y��u)��CTAMģ�͵Ć����O(sh��)Ӌ
���������{(di��o)���� Deb ����[10] ����Ć������A(ch��)���Y(ji��)�σ�(y��u)���� CTAM ģ�ͺͬF(xi��n)�������О��{(di��o)�������O(sh��)Ӌ������
�������ȣ��F(xi��n)���{(di��o)���^�y�Ͼ���ɽ�T���—�_�h�サ�����߷������^���О顣�{(di��o)���аl(f��)�F(xi��n)�����������ԡ�������Ů�Ժ����������ڽ�ͨ�����r���A���ڙM���R·���S���Դ�;���p�����^�֕r���ڽ�Մ�����^���֙C(j��)�� �����ĬF(xi��n)��;��ͨ���ߞ��s�r�g���S��M���R·������(j��)�{(di��o)��^(q��)��F(xi��n)���^�y�Y(ji��)�����������^���О�֞��`Ҏ(gu��)�О顢�^ʧ�О�ͷe�O�О�3������`Ҏ(gu��)�О�ָ�`����ͨ��Ҏ(gu��)���О飬���J�t����б������ڵ�;�^ʧ�О�ָ���������������^�����Ŷ��Д�ʧ�`�Ȍ�(d��o)�µ����^�О飬���S���^�֡����s�r�g��˼������]ע�⽻ͨ�h(hu��n)���M���R·��;�e�O�О�ָ���������С�
������K�������{(di��o)�醖���� 3 ���ֽM�ɣ��ق�����Ϣ�ɼ��������Ԅe�����g�͌W(xu��)�v��;�������^���О������Д࣬�{(di��o)���`Ҏ(gu��)�О顢�^ʧ�О�ͷe�O�О��@ 3 ��О�Ľ�(j��ng)����;�����ˌ�ȫ�Ԅ��{�܇�v���g(sh��)���ܶ��{(di��o)�飬��Ҫ�{(di��o)�����ˌ�ȫ�Ԅ��{�܇�v��ϵ�y(t��ng)�Ԅӻ���Ч�ʵȵđB(t��i)�Ⱥ����ζȡ�����ͨ�^�A(y��)�{(di��o)���M(j��n)�������������ƣ����_����27���}����2020��8���M(j��n)���˞��ڃ��ܵ���ʽ�{(di��o)�顣
����2.2 ��(sh��)��(j��)�@ȡ
�������Ά����{(di��o)�錦��龀���S�C(j��)���L�ߺ��Ͼ��г��е�·�ϵ����ˣ������S�C(j��)����{(di��o)�鷨��ͨ�^�ھ��{(di��o)��͌����{(di��o)����Y(ji��)�ϵķ�ʽ�@�ýY(ji��)�������� 310 �����L�߅��c�˱��Ά����{(di��o)�飬�����ռ�172�݆����������ռ�138�݆��������У���5 �݆�����𰸲�������ش�(zh��n)�_�����U��������Ч�ʞ� 98.38%����Ч�� 305�݆����У��������L�߹� 175 ����Ů�����L�߹� 130 �������L�ߵ����g�ֲ���18~75�q��40.2%�����L��̎��22~30 �q���g�Σ������L�����^�иߵȽ��������L�ߵ����g�ͽ���ˮƽ�ֲ��քe��D2�͈D3��ʾ��
������ �� ��(sh��) �� �L �� �� ס �� �� �� �� ռ �� �� ��(sh��) �� 76.5%���ٲ��־�ס���l(xi��ng)�(zh��n)�����L���վ����дΔ�(sh��)�ֲ�����ÿ�ճ��� 1~2�ε����L��ռ 36.4%������ 3~4 �ε�ռ 29.6%������ 4 �����ϵ�ռ 34%�����⣬�����L�� (ռ�Ȟ� 76.5%) ��ͥ����С��܇����ˣ��˴��{(di��o)��ӱ�����������Ⱥ�����������^�ߌW(xu��)�v����һ���Ľ�(j��ng)��(j��)���A(ch��)��ԓȺ�wҲ�������Ԅ��{�܇�v�����M(f��i)������
����2.3 ��(sh��)��(j��)����
����2.3.1 ��������������
���������{(di��o)�醖�픵(sh��)��(j��)��71.6% �����L���J(r��n)���Լ����ؽ�ͨ��Ҏ(gu��)���IJ�����]���^�����е��`Ҏ(gu��)���^ʧ�О�;38.64%�����L�ߕ����ijЩԭ��ż�������u������(zh��)�І������ᵽ���e�`�О�;���ַe�O�B(t��i)�ȡ������е����L���^�࣬ռ70.5%���@3��О�Ľ�(j��ng)����ռ�����2��ʾ��
����2.3.2 ��(y��u)����CTAMģ����������
�������ڃ�(y��u)���� CTAM ģ�ͣ�����(j��)���ˌ�ȫ�Ԅ��{�܇�v����ϵ�y(t��ng)������Ч�ʡ��O(sh��)�����֮�g�����ԵđB(t��i)�Ⱥ����ζȌ���֪�����Ժ�֪�����Ե�Ӱ��Д����˵�ʹ����Ը��55.8% �����L�ߌ�ȫ�Ԅ��{�܇�v��Ч�ʺͼ����Գ�֧�ֺͷe�O�đB(t��i)�ȣ��� 19.9% �����L�߱������������L��ͬ��Ƚy(t��ng)Ӌ���w��D4��ʾ��
����ͬ�r�����_��֪�����ԡ���֪������ (�����ⲿ����) �c׃��֮�g�����P(gu��n)�ԣ���׃���M(j��n)���p׃�����P(gu��n)�Է���������׃���@���Ծ�С��0.05����֪�����Ժ�֪�������c׃�������@�����P(gu��n)�P(gu��n)ϵ�������P(gu��n)�Զ��^��(qi��ng)���������P(gu��n)��
����2.4 �{(di��o)�锵(sh��)��(j��)�Ŷȼ�Ч�ȷ���
�������������@�õĔ�(sh��)��(j��)�� SPSS24.0 �M(j��n)���Ŷȡ�Ч�șz�Y(ji��)����� 3 ��ʾ�����Ŷșz�Y(ji��)����֪�������О�3���S�Ⱥ̓�(y��u)��CTAMģ��4���S�ȾC�ϽY(ji��)�����^��0.7���_(d��)���˿��ŵij̶ȡ���Ч�șz�Y(ji��)�����Կ�����KMO �� Bartlett ���ƿ���ֵ���_(d��)�����@��ˮƽ����C�˔�(sh��)��(j��)����Ч�ԺͿɿ��ԡ�
����3 ģ�͘�(bi��o)���cӰ����ط���
����3.1 Logitģ�͘�(g��u)��
��������������������팢���ˌ�ȫ�Ԅ��{�܇�v���ܶȄ��֞���ܡ�һ��Ͳ����� 3 ���ӴΣ��ҷ���ƽ���ԙz�@����ˮƽ��0.762����0.05���ʱ���ģ���x�������� Logit ģ�͡�
����3.2 ģ��׃���x��̎��
����������Ҫ�о����ˌ�ȫ�Ԅ��{�܇�v�Ľ��ܶȣ�����׃�������˵Ľ��ܶȣ��֞���ܡ�һ��Ͳ����� 3 �N������׃����Ҫ�����ˌ�ȫ�Ԅ��{�܇�v���ܶȵ�Ӱ����أ���Ҫ�֞邀�ˌ������ء������О����غ͂��ˌ�ȫ�Ԅ��{�܇�v���g(sh��)���ܶ�����3��鷽��ؚw������Ҫ�Ȍ���׃������׃���M(j��n)�Д�(sh��)ֵ�D(zhu��n)�������w���4��ʾ��
����3.3 ģ��ݔ��
����3.3.1 ����Logitģ�͘O����Ȼ��Ӌ
�����\(y��n)��SPSS24.0ܛ��������Logitģ���M(j��n)�ИO����Ȼ��Ӌ�����������˷����@��׃���M(j��n)�кY�x�������Ņ^(q��)�g��95%����r�£��@����ˮƽ�� 0.05���ʮ�(d��ng)�@����p < 0.05�r������ԓ��׃������׃�����@��Ӱ푣�������pֵ��0.05����������(n��i)������ԓ׃������Ӱ푣����нy(t��ng)Ӌ���x��ݔ������(sh��)��Ӌ���5��ʾ��
�����ı� 5 ��֪����ס�^(q��)���^ʧ�О顢��֪�B(t��i)�ȼ����Ό����ˌ�ȫ�Ԅ��{�܇�v�Ľ��ܶ����@��Ӱ푣����дΔ�(sh��)�������Ե��@�����^���@������׃���@���Բ����@��
����3.3.2 ����Logitģ�ͻؚw����
�������^ʧ�О� X8�������� X11 ����֪�B(t��i)�� X12������ X13 �@ЩӰ������еľ��w���} (�� N1~N5, A1~A4 ��) �ٴκY�x�������M���@����ˮƽ����׃���������������M(j��n)������Logitģ�ͻؚw��ֱ��������׃�����@����ˮƽ����Ҫ��[19] ���t�ؚw�^�̽Y(ji��)�����ó���K�Y(ji��)�������Y(ji��)���и�׃���Ļؚwϵ��(sh��)��������Logitģ���У�ģ���и�׃���Ľ�����6��ʾ����K�_����Ч��(y��ng)����(sh��)��ʽ (3) ��ʽ (4) ��ʾ��
����3.4 Ӱ����ط���
����3.4.1 ���ˌ���Ӱ푷���
������ס�ڳ��еľ����������ȫ�Ԅ��{�܇�v����ס���l(xi��ng)�(zh��n)�ľ�����ܶ��Ǿ�ס�ڳ��е� exp( -0.364) = 0.694 ���������н�ͨ���A(ch��)�O(sh��)ʩ���O(sh��)�^���ƣ�������и���ݣ������ȫ�Ԅ��{�܇�v�Ľ��ܶ�Ҳ�^�ߡ���ȫ�Ԅ��{�܇�v�ڳ��еđ�(y��ng)���y��Ҫ�������l(xi��ng)�(zh��n)�������Ҫ������(zh��n)��ϵ�y(t��ng)���O(sh��)�䡣�վ����дΔ�(sh��)��ϵ��(sh��)�������վ����дΔ�(sh��)4�����ϱ�ģ���O(sh��)����0���վ�����1~2�ε����ˌ�ȫ�Ԅ��{�܇�v���ܶ��� 4 �����ϵ� exp (1.027) = 2.793�����վ�����2~4�ε����˽��ܶ��� 4 �����ϵ� exp(0.886) = 2.425 �������վ����дΔ�(sh��)Խ�ٵ����ˌ�ȫ�Ԅ��{�܇�v�Ľ��ܶ�Խ�ߡ�
����3.4.2 �����О�Ӱ푷���
�����������О�Ӱ������У����˵��^ʧ�О��@�����^���@��ģ���O(sh��)��“�ܽ�(j��ng)��”�@һ�����Է�� 0�����^ʧ�О�l(f��)���Ŀ����Է���У�“�IJ�”“��”“ż��”“����(j��ng)��”��“��(j��ng)��”�քe��“�ܽ�(j��ng)��”�� 3.2 ����2.9 ����2.5 ����1.7 ���� 1.5��������ϵ��(sh��)��ؓ(f��)�������^ʧ�О�Խ��(j��ng)��������Խ������ȫ�Ԅ��{�܇�v�����ճ������У����˟o���R���^���^ʧ�О�l(f��)�������h(yu��n)�����`Ҏ(gu��)�О顣��ԓ��О�������J(r��n)������ȫ�Ԅ��{�܇�v��ǰ�����õ���ȫ���ϣ�Ҳ��Ը������ȫ�Ԅ��{�܇�v������ϵ�y(t��ng)��
����3.4.3 ��(y��u)����CTAMģ��Ӱ푷���
����(1) ��֪�B(t��i)��
������֪��������Ҫ�ɸ�֪�B(t��i)�Ⱥ�Ч�ʽM�ɣ�����ҪӰ����؞��֪�B(t��i)�ȡ���(sh��)��(j��)�������������ˌ�ȫ�Ԅ��{�܇�v��֪�B(t��i)��Խ�ã����ܶ�Ҳ��Խ�ߣ��������ˑB(t��i)�Ȟ�“ͬ��”�Ľ��ܶ���ߣ��� “�dz���ͬ��”�� exp(0.251) = 1.285 �����˂���ȫ�Ԅ��{�܇�v���g(sh��)�ĸ�֪�B(t��i)�Ⱥܴ�̶țQ���˂��Ƿ�Ը������ȫ�Ԅ��{�܇�v���g(sh��)�����g(sh��)����ͨϵ�y(t��ng)����Ҫ��Խ��Խ����Ч��(ji��)ʡ���Еr�g���t���˵ĸ�֪������Խ�ߡ�
����(2) ����
���������˶��ԣ����^�֕r�挦ȫ�Ԅ��{�܇�v���đB(t��i)���^�����m�����P(gu��n)��Ҫ�����@����ˮƽ��֪�����ˌ�ȫ�Ԅ��{�܇�v�����ηdz��@���� “��ͬ��”“��̫ͬ��”“һ��”“���^ͬ��”“ͬ��”“�dz�ͬ��”�Ľ��ܶȷքe��“�dz���ͬ��” �� exp(0.941)=2.562, exp(1.019)=2.770, exp(1.086)= 2.962, exp(1.213) =3.363, exp(1.158) =3.184 �� exp (0.507)=1.660 �������ˌ�ȫ�Ԅ��{�܇�v���ζ�Խ�߽��ܶ�ҲԽ��(qi��ng)���ҕ���ȫ�Ԅ��{�܇�v���]�o���ˡ����ѡ�
����(3) ������
���������Ԍ��ⲿ������Q�������á�����Խͬ��ȫ�Ԅ��{�܇�v�����ԣ�Խ������ȫ�Ԅ��{�܇�v������“�dz�ͬ��”��“�dz���ͬ��”�� exp(0.866) = 2.38 �����@Ҳ������ȫ�Ԅ��{�܇�v�����Ե���Ҫ�ԣ�������Խ��(qi��ng)��܇�v����������ϵ�y(t��ng)������ϵ�y(t��ng)���O(sh��)�����Ҳ��Խ��(qi��ng)�����c��ͨ�h(hu��n)���ļ����P(gu��n)ϵҲԽ�o�ܡ�
����4 �Y(ji��)�Z
�������Ļ��ڽ����ă�(y��u)�� CTAM ģ�ͺ͌��H�^�y���������О��O(sh��)Ӌ�{(di��o)�醖�����Ă��w���ԡ������О�����ˌ��Ԅ��{�܇�v���g(sh��)���ܶ� 3 ���挦����չ�_�S�C(j��)�{(di��o)�顣Ȼ��������Logitģ�ͣ��\(y��n)���{(di��o)�锵(sh��)��(j��)��(bi��o)��ģ�ͅ���(sh��)���Y�x�����ˌ�ȫ�Ԅ��{�܇�v���ܶȵ��P(gu��n)�IӰ����ء���(j��ng)�����ó����½Y(ji��)Փ�������ꡢ�߂��иߌW(xu��)�v�Ҿ�ס�ڳ��е����˸�������ȫ�Ԅ��{�܇�v;���дΔ�(sh��)�^�ٵ�����Խ������ȫ�Ԅ��{�܇�v;���ˌ�ȫ�Ԅ��{�܇�v���g(sh��)�ĸ�֪�����Ժ�֪�����Ԍ����ܶ�������ҪӰ푣���Ҫ���F(xi��n)�����ˌ�ȫ�Ԅ��{�܇�v�ĸ�֪�B(t��i)�Ⱥ������ϣ����ˌ�ȫ�Ԅ��{�܇�v�ĸ�֪�B(t��i)��Խ�ã����ζ�Խ�ߣ�Ҳ��Խ����ȫ�Ԅ��{�܇�v;ͬ�r���ⲿ���ص�Ӱ��£������������P(gu��n)�I���ã��@��ζ�����ˌ�ȫ�Ԅ��{�܇�v���g(sh��)�Ľ��ܶ�߀���O(sh��)����O(sh��)��֮�g��ϵ�y(t��ng)�cϵ�y(t��ng)֮�g��܇�v�c���˼���·֮�g�����Ե�Ӱ푡���ȫ�Ԅ��{�܇�v���аl(f��)�ϣ����HҪע��܇�v�������O(sh��)Ӌ����Ҫ��(chu��ng)���c���˵Ľ�����ʽ�������c��ͨ�h(hu��n)����ƥ��ȡ�ͬ�r�������Ì�ȫ�Ԅ��{�܇�v�������⣬ҲҪ�ӏ�(qi��ng)�����˵Ľ�ͨ��ȫ������
�������Ļ�����Փ��ܺ͌��C���������˽Ƕȷ��������О�ͼ��g(sh��)���܌�ȫ�Ԅ��{�܇�v���ܶȵ�Ӱ푣�����ijЩ������ھ��ޣ���ȱ����δ�����M(f��i)ˮƽ�����ɷ�Ҏ(gu��)�������c��(zh��)�����ȵ����صľC�Ͽ��]��ͬ�r����SP�����{(di��o)��@�õĔ�(sh��)��(j��)����һ�������^�ԡ���ˣ�δ���ɏĸ���S���о��Ԅ��{�܇�v���ܶȵ�Ӱ����أ�������ȫ�Ԅ��{�܇�v�M(j��n)���Ј���ǰ�ڲ�ȡԇ��c SP �� RP �����{(di��o)����Y(ji��)�ϵķ�ʽ�M(j��n)���о���——Փ�����ߣ��É���������Ƽ��÷����
���������īI(xi��n)
����[1] ��һƽ . ������(chu��ng)�°l(f��)չ�ĬF(xi��n)���o���{���܇[J]. ������܇��2003(1)��12-14��18.
����[2] KYRIAKIDIS M, HAPPEE R, DE WINTER J C F. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents [J]. Transportation Research Part F: Traffic Psychology & Behaviour, 2015, 32: 127-140.
����[3] ZMUD J, SENER I N, WAGNER J. Self-driving vehicles: Determinants of adoption and conditions of usage[J]. Transportation Research Record: Journal of the Transportation Research Board, 2016, 2565: 57-64.
����[4] NORDHOFF S, AREM B V, HAPPEE R. A conceptual model to explain, predict, and improve user acceptance of driverless vehicles[J]. Transportation Research Record: Journal of the Transportation Research Board, 2016, 2602: 60-67.
����[5] ��������. �Ї��Ԅ��{���܇���M(f��i)�Ј����ܶ��{(di��o)��[J]. �L����W(xu��)�W(xu��)�� (����ƌW(xu��)��)��2017�� 19(6)��34-42.
����[6] HULSE L, XIE H, GALEA E R. Perceptions of autonomous vehicles: Relationships with road users, risk, gender and age[J]. Safety Science, 2018, 102: 1-13.
����[7] COMBS T S, SANDT L S, CLAMANN M P, et al. Automated vehicles and pedestrian safety: Exploring the promise and limits of pedestrian detection (in press)[J]. American Journal of Preventive Medicine, 2019, 56(1): 1-7.
����[8] WOODMAN R, LU K, HIGGINS M D, et al. Gap acceptance study of pedestrians crossing between platooning autonomous vehicles in a virtual environment[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2019, 67: 1-14.
����[9] GUPTA S, VASARDANI M, LOHANI B, et al. Pedestrian's risk-based negotiation model for selfdriving vehicles to get the right of way[J]. Accident Analysis & Prevention, 2019, 124: 163-173.
����[10] DEB S, STRAWDERMAN L, CARRUTH D W, et al. Development and validation of a questionnaire to assess pedestrian receptivity toward fully autonomous vehicles[J]. Transportation Research Part C: Emerging Technologies, 2017, 84: 178-195.
����[11] ��ᓣ��T�� . �ɶ��г��е�·���˽�ͨ�����о� [J]. ��ͨ��(ji��)���c�h(hu��n)����2017��13(6)��27-30.
����[12] �����R�E���S��������. �������P(gu��n)����Փ�������^��ʹ���֙C(j��)�О����[J]. ��ͨ���̣�2019�� 19(3)��52-56.
����[13] XU Z G, ZHANG K F, MIN H G, et al. What drives people to accept automated vehicles? Findings from a field experiment[J]. Transportation Research Part C: Emerging Technologies, 2018, 95: 320-334.
����[14] ZHANG T R, TAO D, QU X D, et al. The roles of initial trust and perceived risk in public's acceptance of automated vehicles[J]. Transportation Research Part C: Emerging Technologies, 2019, 98: 207-220.
����[15] DAVIS F D. Perceived Usefulness, perceived ease of use, and user acceptance of information technology[J]. MIS Quarterly, 1989, 13(3): 319-340.
����[16] AJZEN I. The theory of planned behavior[J]. Organizational Behavior & Human Decision Processes, 1991, 50(2): 179-211.